Моделирование и анализ данных
2024. Том 14. № 3. С. 63–86
doi:10.17759/mda.2024140304
ISSN: 2219-3758 / 2311-9454 (online)
О субоптимальном решении задачи быстродействия для линейной дискретной системы в случае несимметричных ограничений на управления
Аннотация
В статье рассматривается линейная дискретная система с ограниченным управлением. Для системы решается задача быстродействия, то есть требуется построить процесс управления, переводящий систему из начального состояния в начало координат за минимальное число шагов. Если множество допустимых значений управления имеет структуру суперэллипса, то задача вычисления оптимального управления может быть сведена к решению системы алгебраических уравнений. Для множеств произвольной структуры разработан метод суперэллипсоидальной аппроксимации, рассмотрен случай несимметричных множеств. Приведены примеры.
Общая информация
Ключевые слова: система управления, задача быстродействия, симметрические множества, принцип максимума, суперэллипс
Рубрика издания: Методы оптимизации
Тип материала: научная статья
DOI: https://doi.org/10.17759/mda.2024140304
Получена: 16.06.2024
Принята в печать:
Для цитаты: Подгорная В.М. О субоптимальном решении задачи быстродействия для линейной дискретной системы в случае несимметричных ограничений на управления // Моделирование и анализ данных. 2024. Том 14. № 3. С. 63–86. DOI: 10.17759/mda.2024140304
Полный текст
Введение
Дискретный принцип максимума часто используется для решения задач оптимального управления дискретными системами в качестве необходимых, а иногда и достаточных условий оптимальности процесса. В частности, для линейных систем он является необходимым и достаточным условием [2, 11]. Принцип максимума испытывает сложности при рассмотрении вырожденных задач, то есть тех, для которых оптимальное значение достигается во внутренней точке множества достижимости [Пропой, 1973], это приводит к вырождению траектории сопряженной системы и, как следствие, к невозможности вычислить оптимальное управление из его соотношений. Одной из таких задач является задача быстродействия, которая характеризуется дискретным критерием качества, то есть числом шагов, необходимым для перевода системы в начало координат, которое не может быть вычислено из дискретного принципа максимума.
Среди актуальных исследований на тему решения задачи быстродействия для линейных дискретных систем можно выделить следующие работы.
В [Abdelhak, 2010] рассматривается смешанный функционал, включающий в том числе и время, но за счет второго слагаемого в функционале не происходит вырождения. В [Bako, 2011] предложен подход к решению задачи быстродействия, основанный на разреженной оптимизации множества состояний, то есть минимизации количества ненулевых элементов из множества состояний. В [Discrete-Time System Optimal, 2018] решается задача управления путем дискретизации по Годунову дифференциального уравнения в частных производных Лайтхилла–Уильямса–Ричардса. С использованием метода дискретных сопряжений результирующая нелинейная задача оптимального управления сводится к системе градиентных вычислений.
Если время вычислено и зафиксировано, то задача обладает вырожденностью с точки зрения построения сопряженной траектории. Поэтому оказывается актуальным исследование различных подходов к регуляризации принципа максимума. В частности, в работе [9, 6] одним из таких методов регуляризации является сужение множества допустимых значений управлений для того, чтобы терминальное состояние оптимальной траектории находилось в граничной точке множества достижимости. Это приводит к возможности составить конструктивные соотношения принципа максимума, из которых может быть построен процесс. Сложностью такого подхода является численное разрешение полученных условий.
В работах [7, 8] рассматривается задача сведения соотношений регуляризованного принципа максимума к системе алгебраических уравнений для суперэллипсоидальной структуры множества допустимых значений управлений при помощи аппроксимационных методов. Суперэллипсы в качестве аппроксимирующих множеств обладают большим числом степеней свободы, чем эллипсы. Хотя существует ряд приложений данного класса множеств в прикладных и теоретических задачах [13, 15, 17], их аппарат на данный момент является плохо исследованным. Данная работа продолжает результаты [7, 8], расширяя возможности суперэллипсоидальных аппроксимаций за счет выбора центра множества в приложении к решению задачи быстродействия.
Обозначения
Постановка задачи
Построение оптимальных по быстродействию процессов сильно связано с аппаратом множеств 0-управляемости [5, 9].
Тогда
-
1. – оптимальный по быстродействию процесс системы ;
-
2.если , то оптимальный процесс единственный;
-
3. .
В этой статье предлагается усилить результаты, полученные в [Ибрагимов, 2023а], рассмотрев более общий подход к аппроксимации:
Сведение условий принципа максимума к системе алгебраических уравнений
Покажем, что условия (5) можно свести к эквивалентной системе алгебраических уравнений. Для этого приведем аналитическое описание множеств 0-управляемости и некоторые свойства строго выпуклых и суперэллипсоидальных множеств.
Также из [6, леммы 5, 6] вытекает следующее утверждение.
Тогда
-
1.
-
2.
С учетом пункта 1 леммы 3
Таким образом
Частный случай суперэллипсоидальных множеств
Доказательство. Из определения нормального конуса следует пункт 1. Рассмотрим цепочку равенств
Учтем известное представление нормального конуса и опорной точки для суперэллипсоидального множества и построим их описание для случая (6).
Доказательство. Согласно определению нормального конуса и лемме 4 пункту 1 выполняется включение
Пункт 2 следует из пункта 2 леммы 4 и пункта 2 леммы 5:
которое также удовлетворяет условиям (5).
Теорема 3 и следствие 2 в совокупности с теоремой 1 позволяют полностью решить задачу быстродействия для линейной дискретной системы в случае суперэллипсоидальной структуры множества допустимых значений управлений (6). Разрешение условий (5) согласно следствию 2 эквивалентно численному решению системы алгебраических уравнений. Одновременно оптимальный процесс и траектория сопряженной системы могут быть вычислены по рекуррентным соотношениям, представленным в теореме 1. Оптимальное управление явным образом определяется пунктом 2 следствия 1.
Внутренняя суперэллипсоидальная аппроксимация выпуклого тела
Результаты [7, 8] расширены на случай, когда множество допустимых значений управлений несимметрично. Имеет смысл рассмотреть сдвиг множества для лучшей аппроксимации, то есть подобрать центр аппроксимирующего множества.
Центром масс называется геометрическая точка, положение которой определяется распределением массы в теле [4, §10 гл. IV]. Он может быть вычислен путем численного интегрирования:
где
Чебышевский центр ограниченного выпуклого множества является центром описанного шара минимального радиуса [Гаркави, 1964]. Для случая, когда множество допустимых значений управлений является многогранником, Чебышевский центр является решением следующей задачи оптимизации
После определения центра суперэллипсоидального множества и его сдвига, задача сводится к уже рассмотренному в [7, 8].
Пример 1. Для системы с исходными параметрами
Для 3 случаев центра суперэллипса определены тензоры инерции и вычислены матрицы ориентации суперэллипса:
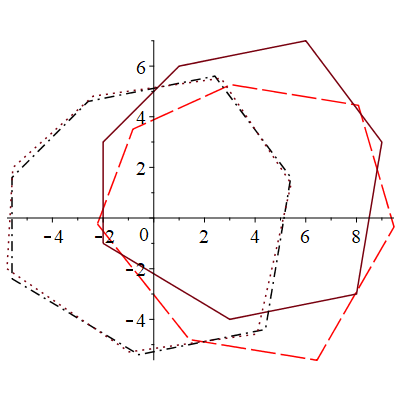
Рис. 1. Исходное множество (непрерывной линией), ориентированное (штриховой линией), ориентированное (штрихпунктирной линией), ориентированное (пунктирной линией)
для которых при решении оптимизационных задач были получены оптимальные значения параметров суперэллипсоидальной аппроксимации согласно [7, 8]:
Множество без сдвига:
Множество со сдвигом на центр масс:
Множество со сдвигом на Чебышевский центр:
Результаты аппроксимации можно увидеть на рис. 2.
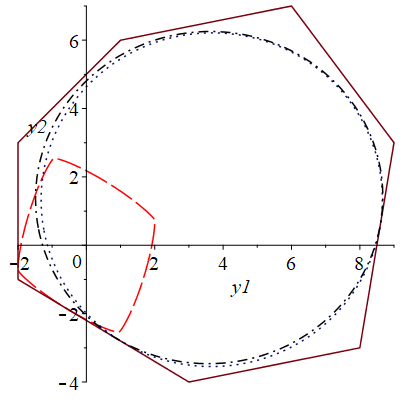
Рис. 2. Исходное множество (непрерывной линией), ориентированное (штриховой линией), ориентированное (штрихпунктирной линией), ориентированное (пунктирной линией)
По рисунку видно, что суперэллипсы со сдвигом в центр масс и Чебышевский центр имеют большую площадь по сравнению с суперэллипсом без сдвига.
Множество без сдвига:
Множество со сдвигом на центр масс:
Множество со сдвигом на Чебышевский центр:
Оптимальные траектории, построенные в соответствии с теоремой 2, представлены в табл. 1–4.
Таблица 1. Оптимальная траектория и оптимальное управление для линейной дискретной системы при (множество без сдвига) (k=0…6)
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2. Оптимальная траектория и оптимальное управление для линейной дискретной системы при (множество без сдвига) (k=7…9)
|
|
7 |
8 |
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3. Оптимальная траектория и оптимальное управление для линейной дискретной системы при (множество со сдвигом на центр масс)
|
|
0 |
1 |
2 |
3 |
4 |
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 4. Оптимальная траектория и оптимальное управление для линейной дискретной системы при (множество со сдвигом на Чебышевский центр)
|
|
0 |
1 |
2 |
3 |
4 |
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Поскольку множество управлений в случаях с центром масс и с Чебышевским центром шире по сравнению со множеством без сдвига, начала координат удается достигнуть быстрее.
Пример 2. Система имеет следующие исходные данные
Тензоры инерции, для которых вычисляются матрицы ориентации суперэллипса, выглядят следующим образом:
Рис. 3. Исходное множество (непрерывной линией), ориентированное (штрихпунктирной линией), ориентированное (пунктирной линией)
для которых при решении оптимизационных задач были получены оптимальные значения параметров суперэллипсоидальной аппроксимации согласно [7, 8]:
Множество со сдвигом на центр масс:
Множество со сдвигом на Чебышевский центр:
Результаты аппроксимации можно увидеть на рис. 4.
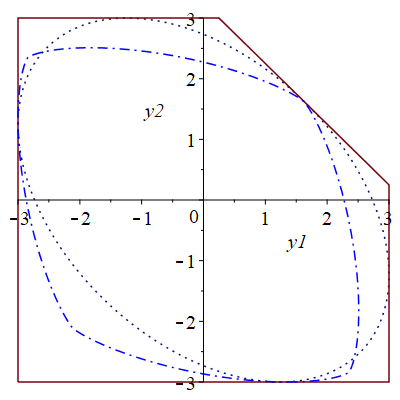
Рис. 4. Исходное множество (непрерывной линией), ориентированное (штрихпунктирной линией), ориентированное (пунктирной линией)
Множество со сдвигом на центр масс:
Множество со сдвигом на Чебышевский центр:
Оптимальные траектории, построенные в соответствии с теоремой 2, представлены в таблицах 5–6.
Таблица 5. Оптимальная траектория и оптимальное управление для линейной дискретной системы при (множество со сдвигом на центр масс)
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 6
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Особых отличий в траекториях нет, однако мера суперэллипса со сдвигом на центр масс больше меры суперэллипса со сдвигом на Чебышевский центр (в данном случае совпадает со множеством без сдвига).
Пример 3. В данном примере рассмотрим наибольший по мере суперэллипс и попробуем решить задачу быстродействия.
Система имеет следующие входные данные
Для 3 случаев центра суперэллипса определены тензоры инерции и вычислены матрицы ориентации суперэллипса:
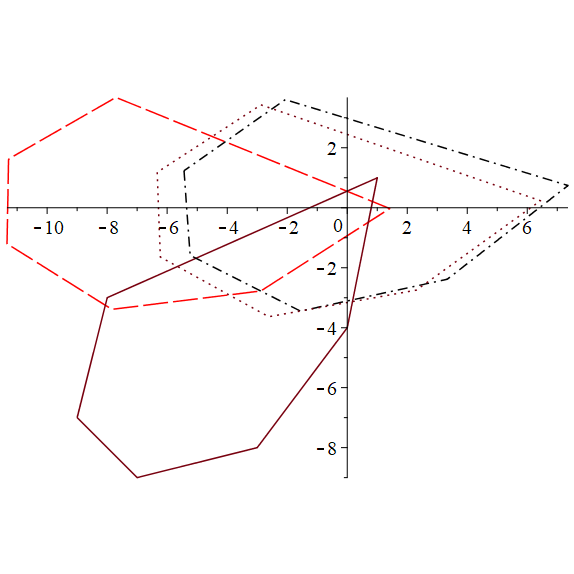
Рис. 5. Исходное множество (непрерывной линией), ориентированное (штриховой линией), ориентированное (штрихпунктирной линией), ориентированное (пунктирной линией)
для которых при решении оптимизационных задач были получены оптимальные значения параметров суперэллипсоидальной аппроксимации согласно [7, 8]:
Множество без сдвига:
Множество со сдвигом на центр масс:
Множество со сдвигом на Чебышевский центр:
Результаты аппроксимации можно увидеть на рис. 6.
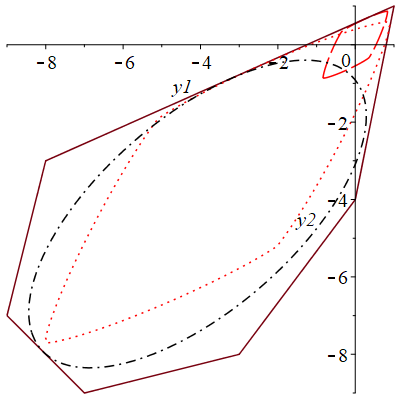
Рис. 6. Исходное множество (непрерывной линией), ориентированное (штриховой линией), ориентированное (штрихпунктирной линией), ориентированное (пунктирной линией)
Заключение
В разделе 2 введены обозначения для дальнейшей работы. В разделе 3 описана постановка задачи быстродействия и задачи аппроксимации. В разделе 4 рассматривается приведение сложноразрешаемых условий из принципа максимума к суперэллипсоидальной структуре ограничений, которую можно разрешить аналитически. В разделе 5 представлена внутренняя суперэллипсоидальная аппроксимация выпуклого тела, в частности рассмотрен случай несимметричным множеств, для которых требуется определить центр аппроксимирующего множества. В разделе 6 приведены примеры решения задачи быстродействия на основе доказанных утверждений для разных систем со сравнением результатов для различных центров суперэллипса.
Представленные в статье методы могут применяться для численного моделирования и симуляции динамики разнообразных естественных и технических систем. За счет простоты построения оптимальных процессов на основе принципа максимума и формирования программного управления, удается не только решить задачу быстродействия для заданного начального состояния, но и собрать большой объем модельных данных и различных траекторий для дальнейшего анализа системы. В то же время, аппарат суперэллипсоидальных аппроксимаций гарантирует более высокую точность по сравнению с классическими эллипсоидальными методами аппроксимации.
Литература
- Берендакова А.В., Ибрагимов Д.Н. О методе построения внешних оценок предельного множества управляемости для линейной дискретной системы с ограниченным управлением // АиТ. 2023. № 2. С. 3–34. DOI: 10.31857/S0005231023020010
- Болтянский В.Г. Оптимальное управление дискретными системами // М.: Наука. 1973.
- Гаркави А.Л. О чебышевском центре и выпуклой оболочке множества // Успехи матем.наук. 1964. Т. 19. № 6. С. 139-145.
- Журавлев В.Ф. Основы теоретической механики // М.: Издательство Физико-математической литературы. 2001.
- Ибрагимов Д.Н., Новожилкин Н.М., Порцева Е.Ю. О достаточных условиях оптимальности гарантирующего управления в задаче быстродействия для линейной нестационарной дискретной системы с ограниченным управлением // АиТ. 2021. № 12. С. 48–72. DOI: 10.31857/S0005231021120047
- Ибрагимов Д.Н. О задаче быстродействия для класса линейных автономных бесконечномерных систем с дискретным временем, ограниченным управлением и вырожденным оператором // АиТ. 2019. № 3. C. 3–25. DOI: 10.1134/S0005231019030012
- Ибрагимов Д.Н., Подгорная В.М. Суперэллипсоидальные аппроксимации в задаче быстродействия для двумерной линейной дискретной системы с ограниченным управлением // Моделирование и анализ данных. 2023. Т. 13. № 2. С. 151–179. DOI: 10.17759/mda.2023130209
- Ибрагимов Д.Н., Подгорная В.М. Формирование оптимального по быстродействию ограниченного управления для линейных дискретных систем на основе метода суперэллипсоидальной аппроксимации // АиТ. 2023. № 9. С. 51–81. DOI: 10.31857/S0005231023090039
- Ибрагимов Д.Н., Сиротин А.Н. О задаче быстродействия для класса линейных автономных бесконечномерных систем с дискретным временем и ограниченным управлением // АиТ. 2017. № 10. C. 3–32. DOI: 10.1134/S0005117917100010
- Колмогоров А.Н., Фомин С.В. Элементы теории функций и функционального анализа // М.: Физматлит. 2012.
- Пропой А.И. Элементы теории оптимальных дискретных процессов // М.: Наука. 1973.
- Рокафеллар Р. Выпуклый анализ // М.: Мир. 1973.
- Страшнов С.В. Использование суперэллипсов в компьютерном моделировании строительных и машиностроительных объектов // Вестник ЮУрГУ. Серия «Строительство и архитектура». 2023. Т.23. № 4. С. 67-76. DOI:10.14529/build230408
- Abdelhak A., Rachik M. The Linear Quadratic Minimum-Time Problem for a Class of Discrete Systems // Optimization. 2010. Vol. 59(4). P. 575–87. DOI:10.1080/02331930801954672
- A Superellipse with Deformation and Its Application in Describing the Cross-Sectional Shapes of a Square Bamboo // Weiwei Huang et al. 2020. № 12, 2073. DOI:10.3390/sym12122073
- Bako L., Chen D., Lecoeuche S. A numerical solution to the minimum-time control problem for linear discrete-time systems // CoRR. 2011. DOI:10.48550/arXiv.1109.3772
- Capturing spiral radial growth of conifers using the superellipse to model tree-ring geometric shape // Shi Pei-Jian et al. Frontiers in Plant Science. 2015. Vol. 6 DOI:10.3389/fpls.2015.00856
- Discrete-Time System Optimal Dynamic Traffic Assignment (SO-DTA) with Partial Control for Physical Queuing Networks // Samitha Samaranayake et al. Transportation Science. 2018. Vol. 52. № 4. DOI:1287/trsc.2017.0800
Информация об авторах
Метрики
Просмотров web
За все время: 94
В прошлом месяце: 26
В текущем месяце: 7
Скачиваний PDF
За все время: 38
В прошлом месяце: 10
В текущем месяце: 1
Всего
За все время: 132
В прошлом месяце: 36
В текущем месяце: 8