Моделирование и анализ данных
2024. Том 14. № 4. С. 104–114
doi:10.17759/mda.2024140407
ISSN: 2219-3758 / 2311-9454 (online)
Формирование области начальных условий воздушных стартов беспилотного летательного аппарата
Аннотация
Рассматривается воздушный старт беспилотного летательного аппарата (БЛА), транспортируемого авиационным носителем. Показано, что для выполнения допустимого старта с задаваемыми начальными условиями по высоте и скорости носителя, необходима предстартовая настройка параметров автопилота, обеспечивающая ограничение угловых скоростей БЛА в процессе прохождения им интерференционного слоя, образующегося вокруг носителя. Настраиваемыми параметрами являются коэффициенты ПИД-регуляторов в контурах стабилизации угловых скоростей БЛА. Расчет искомых коэффициентов производится разработанным алгоритмом на основе метода дифференциальной эволюции. Тестовое моделирование переходных процессов подтверждает работоспособность и применимость предлагаемого подхода. Оценка результатов расчета искомых коэффициентов ПИД-регуляторов алгоритмом дифференциальной эволюции показало возможность существенного расширения области начальных условий воздушных стартов по сравнению с начальными условиями, рассчитанными человеком-оператором.
Общая информация
Ключевые слова: беспилотный летательный аппарат, авиационный носитель, воздушный старт, перцептивный переходный процесс, коэффициенты ПИД-регулятора, алгоритм дифференциальной эволюции
Рубрика издания: Методы оптимизации
Тип материала: научная статья
DOI: https://doi.org/10.17759/mda.2024140407
Финансирование. Работа выполнена в рамках государственного задания Министерства науки и высшего образования России (тема № FSFF-2024-0001).
Получена: 28.11.2024
Принята в печать:
Для цитаты: Ким Н.В., Походенко М.В. Формирование области начальных условий воздушных стартов беспилотного летательного аппарата // Моделирование и анализ данных. 2024. Том 14. № 4. С. 104–114. DOI: 10.17759/mda.2024140407
Полный текст
Введение
В настоящее время большое внимание уделяется разработкам беспилотных летательных аппаратов (БЛА) различных типов [Беспилотные летательные аппараты, 2008]. Перспективным представляется направление, когда малоразмерные БЛА транспортируются к месту выполнения целевых задач авиационными носителями [Ким, 2021].
Воздушные старты БЛА производятся при различных скоростях и высотах полета носителей и требует разработки эффективных методов и алгоритмов расчета областей начальных условий допустимых воздушных стартов. При этом реализуемые переходные процессы (от момента старта до выхода на необходимую траекторию полета) должны обеспечивать выполнение конкретных требований в условиях воздействия дестабилизирующих интерференционных воздушных потоков [Ким, 2021; Ким, 2022].
Будем считать, что выполнение заданных требований к допустимым переходным процессам обеспечивается автопилотом (АП), оснащённым ПИД-регуляторами. Предстартовый расчет коэффициентов ПИД-регуляторов для различных возможных начальных условий старта является сложным и трудоемким процессом, т.к. требует оптимизации многомодальных и недифференцируемых целевых функций на основе многократного моделирования переходных процессов с использованием нелинейных моделей БЛА и АП [Беспилотные летательные аппараты, 2008; Бесекерский, 2003].
В настоящее время в основном данный процесс реализуется в операторном режиме, что приводит к высокой трудоемкости вычислений и влиянию «человеческого фактора» на надежность вычислений.
Целью работы является повышение эффективности формирования области начальных условий воздушных стартов БЛА за счет разработки алгоритма расчета коэффициентов ПИД-регулятора автопилота на предстартовом этапе.
Реализация воздушного старта БЛА
Основные варианты траекторий полета БЛА после воздушного старта схематично представлены на рис. 1:
- траектория 1 является допустимой траекторией воздушного старта, обеспечивающая штатный выход БЛА на заданную траекторию полета;
- траектории 2, 3 являются недопустимыми и характеризуются потерей управляемости.
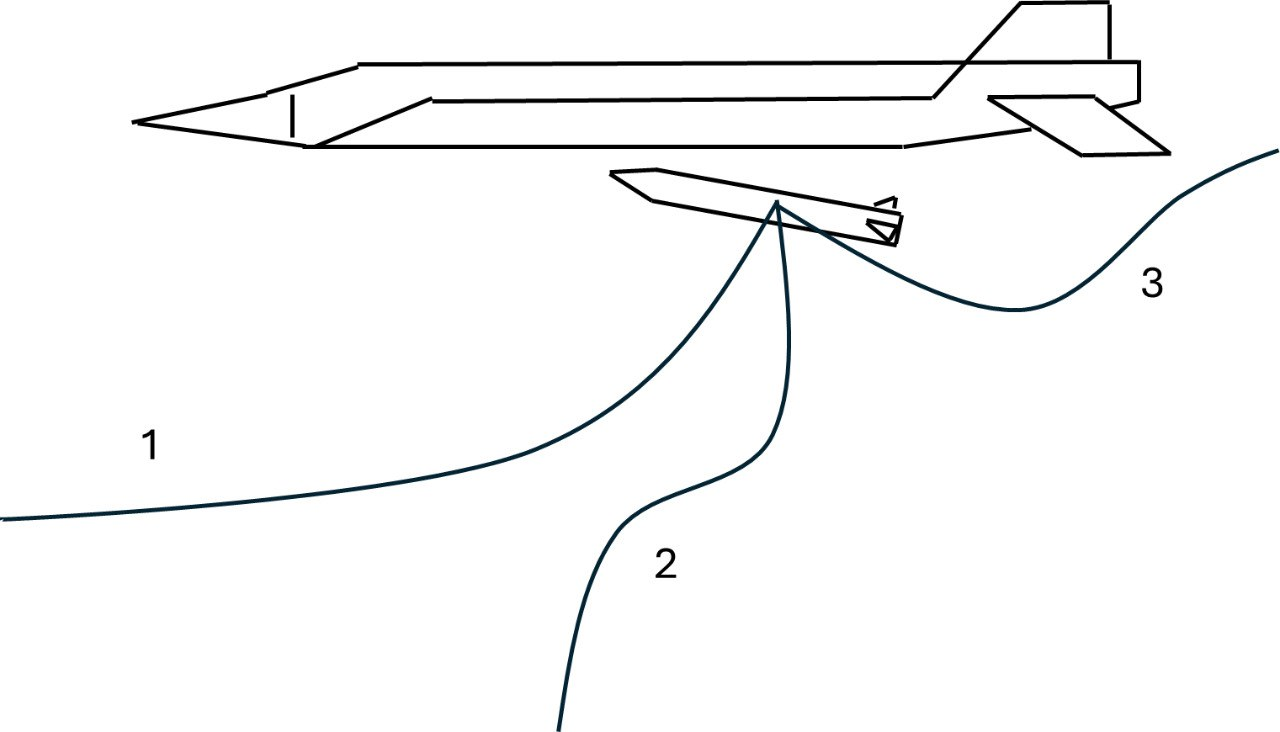
Рис. 1. Относительные траектории БЛА
При горизонтальном прямолинейном полете авиационного носителя характер переходных процессов изменяется в зависимости от начальных условий воздушного старта БЛА: высоты H и скорости полета носителя M, где M – число Маха, а также настройки регулируемых параметров АП – коэффициентов ПИД-регуляторов [Денисенко, 2008].
В исследуемом варианте регуляторы АП представляют из себя наборы ПИД-регуляторов, управляющих угловыми скоростями БЛА в каналах тангажа ωz и крена ωx. В рамках данной работы настройка проводилась по трем параметрам K=(Kp, Ki ,Kd)T в каждом из каналов - (Kzp, Kzi ,Kzd)T для канала тангажа и (Kxp, Kxi,Kxd)T для канала крена.
Соответственно, необходимо обеспечение допустимого полёта БЛА в окрестности носителя, при котором указанные выше условия выполняются. На основе данных требований формируется методология подхода к обеспечению допустимого полёта на начальном участке воздушного старта.
На рис. 2 представлены варианты допустимого (сплошная линия) и недопустимого (штрихпунктирная линия) режимов полета на этапе переходных процессов по некоторому условному управляемому параметру А.
Штриховой линией показана граница области, внутри которой переходные процессы являются допустимыми.
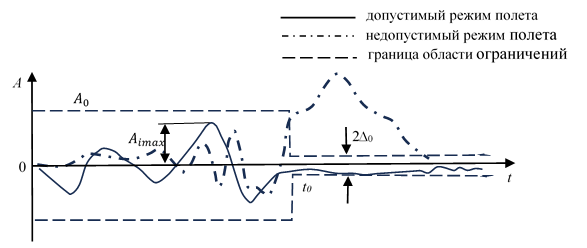
Рис.2. Ограничения на допустимое качество переходного процесса
В общем случае требования к качеству переходного процесса задаются в виде ограничений Wo = (t0, A0, ∆0)T на прямые оценки качества Wr = (tр, Amax, ∆max)T, где
tр ≤ t0 – время регулирования, определяемое требуемым временем выхода на заданную траекторию полета БЛА;
| Amax | ≤ A0– ограничение допустимого перерегулирования процесса;
|∆max | ≤ ∆0 – отклонение от установившегося значения управляемого параметра, определяющее допустимую ошибку при выходе БЛА на заданную траекторию полета.
Предварительные исследования показали, что для рассматриваемого типа БЛА наиболее значимыми параметрами в начальный период воздушного старта, определяющими характер переходного процесса, являются угловые скорости БЛА ωx, ωy, ωz. Следовательно, требования к показателям качества будут иметь вид:
Wo= (t0, ωx0, ωy0, ωz0, ∆x0, ∆y0, ∆z0)T ≥Wr = (t, ωx, ωy, ωz, ∆x, ∆y, ∆z,)T, (1)
где |ωx| ≤ ωx0, |ωy| ≤ ωy0, |ωz| ≤ ωz0 при tp ≤ t0 – ограничения на перерегулирование,
|∆x| ≤ ∆x0, |∆y| ≤ ∆y0, |∆z| ≤ ∆z0 при tp > t0 – отклонение от установившегося значения управляемого параметра, индекс «0» определяет задаваемые параметры.
Если фактические значения параметров переходных процессов хотя бы по одному из показателей качества выходят за указанные ограничения, то переходный процесс считается недопустимым.
Будем считать, что в контурах стабилизации БЛА используются традиционные схемы ПИД-регуляторов [Денисенко, 2008].
На рис.3 представлена схема расчета коэффициентов ПИД-регулятора для различных начальных условий воздушного старта БЛА.
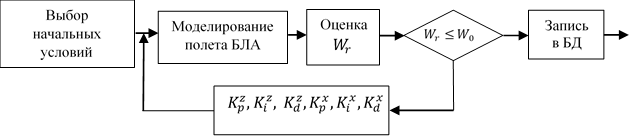
Рис.3. Схема расчета коэффициентов ПИД-регулятора
Для каждой исследуемой точки области начальных условий проводится моделирование воздушного старта с различными значениями Kzp, Kzi,Kzd, Kxp, Kxi, Kxd и рассчитывается текущая оценка Wr. В исследованиях использовались традиционные модели для БЛА самолетного типа [Беспилотные летательные аппараты, 2008].
При выполнении условия (1) Wr ≤ W0, соответствующие значения коэффициентов заносятся в базу данных (БД), в противном случае генерируются новые значения коэффициентов.
Сложность выбора искомой комбинации коэффициентов приводит к возрастанию объемов требуемых вычислений. Для выбора метода расчета был проведен анализ методов многомерной оптимизации, в частности, широкого класса метаэвриистических методов. Анализ показан, что при решении исследуемой задачи наиболее перспективным является метод дифференциальной эволюции (ДЭ) [Ковалевич, 2011].
Для реализации метода ДЭ при расчете коэффициентов ПИД-регуляторов необходимо ввести дополнительный критерий качества переходного процесса при воздушном старте БЛА, не предусмотренный в (1). Для этого предложено использовать квадратичную интегральную оценку (2), которая не является показателем, определяющим требуемое качество переходного процесса, но обеспечивает возможность направленного поиска искомых коэффициентов
J = ∫[ωуст - ω(t)]2dt=∫ω21(t)dt, (2)
где ωуст – установившееся значение угловой скорости БЛА, ω(t) – текущее значение угловой скорости, t – время.
Оценка J должна производиться на основе моделирования переходных процессов для различных значений коэффициентов K=(Kzp, Kzi,Kzd, Kxp, Kxi, Kxd)T. При этом целью процесса не является поиск оптимальных значений коэффициентов, а только поиск значений, удовлетворяющих (1).
Алгоритм расчета коэффициентов ПИД-регулятора на основе метода ДЭ
Метод дифференциальной эволюции основан на анализе эволюционных процессов. Особенностью алгоритмов ДЭ является использование различий между индивидами (значениями аргумента целевой функции), реализованное линейным оператором, называемым «дифференциацией».
На рис. 4 представлена блок-схема одного шага генерации популяции алгоритма расчета коэффициентов K=(Kzp, Kzi,Kzd, Kxp, Kxi, Kxd)T на основе метода ДЭ, обеспечивающих реализацию переходного процесса заданного качества после воздушного старта из некоторой выбранной точки начальных условий.
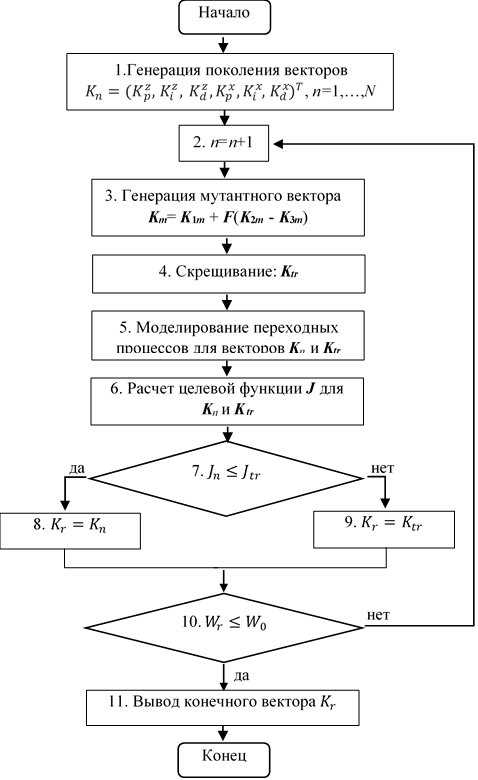
Рис. 4. Блок-схема алгоритма расчета Kn
Алгоритм ДЭ предназначен для нахождения глобального экстремума недифференцируемых, нелинейных, мультимодальных (имеющих, возможно, большое число локальных экстремумов) функций от многих переменных. Подобно другим эволюционным алгоритмам ДЭ рассматривает случайную популяцию решений.
Алгоритм ДЭ основывается на идее вычисления разностного вектора между двумя векторами и добавления этого разностного вектора к третьей особи для создания нового кандидатного решения. На каждой итерации алгоритма индивидуумы оцениваются с помощью целевой функции (или функции приспособленности).
На рисунках 5, 6, 7 представлены графики переходных процессов воздушного старта (высота – 500 м, скорость – 0,9 М), реализованного при использовании коэффициентов ПИД-регуляторов.
На рис.5 показано линейное перемещение БЛА по направлениям Y(X), Z(X) [м], по горизонтальной оси – перемещение по направлению X.
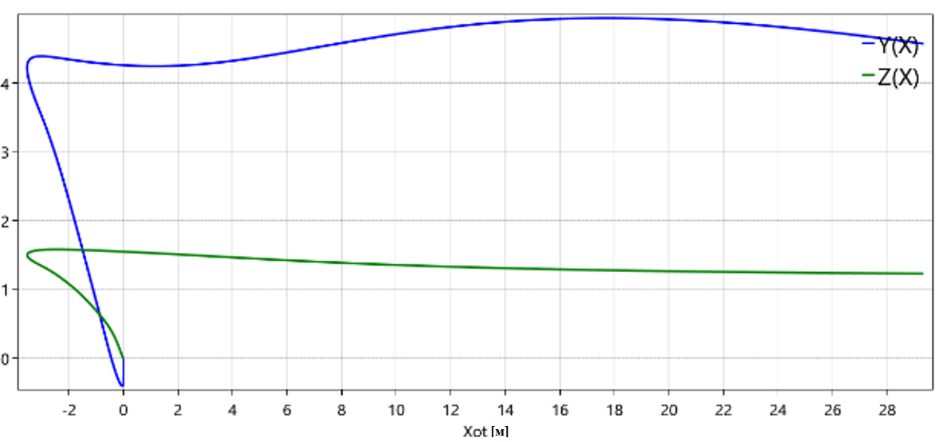
Рис. 5. линейное перемещение БЛА
На рис.6 представлены графики изменения угловых скоростей БЛА ωy, ωz.
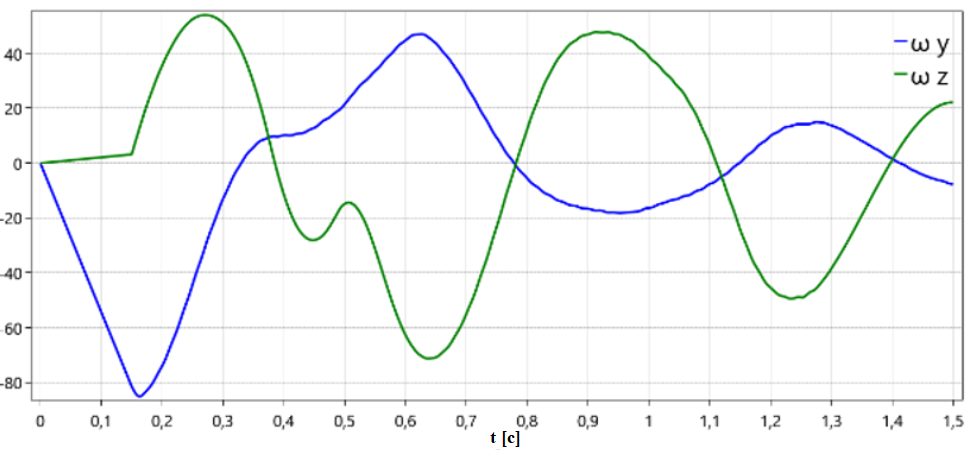
Рис. 6. Динамика изменения угловых скоростей в каналах ωy, ωz
На рис.7 представлены графики изменения угловой скорости ωx и угла крена γ.
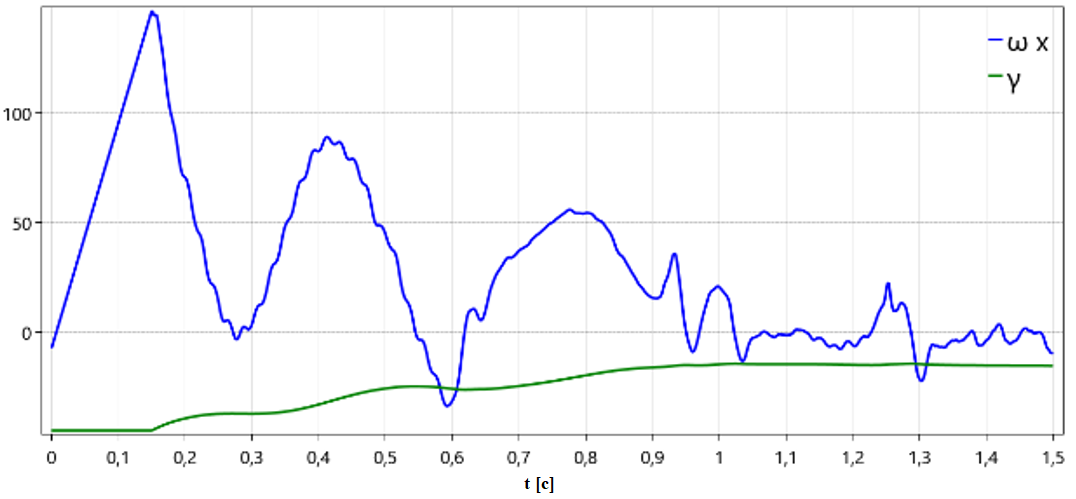
Рис. 7. Динамика изменения угловой скорости ωx и угла крена γ
В данном процессе все требования (ограничение – 50 град./c) к угловым скоростям ωx, ωy, ωz выполнены и данный процесс является допустимым.
Моделирование переходных процессов для 200 начальных условий воздушных стартов в диапазоне высот 500м – 16000 м и скоростей носителя 0,5 М – 1,5 М показал высокую эффективность расчета алгоритмом ДЭ: для более 85% точек начальных условий найдены наборы коэффициентов, обеспечивающие допустимый старт БЛА.
Результаты исследований подтверждают более высокую эффективность расчетов алгоритмом ДЭ коэффициентов ПИД-регуляторов, обеспечивающих допустимые воздушные старты БЛА. по сравнению с расчетами операторного метода.
Для сравнения эффективности алгоритма ДЭ и операторного метода были проведены расчеты алгоритмом ДЭ для начальных условий, в которых операторный метод не смог найти коэффициенты, обеспечивающие допустимые переходные процессы.
Расчет эффективности (в процентах) для каждой высоты H проводился по формуле
Eкор(H)%=((NОмНд (H) - NДэНд (H))/(NОмНд (H)))*100, (3)
где NОмНд (H), NДэНд (H) – количество недопустимых переходных процессов при использовании операторного метода и алгоритма ДЭ, соответственно.
На рис. 8 представлены диаграмма эффективности алгоритма ДЭ при корректировке недопустимых переходных процессов старта на различных высотах.
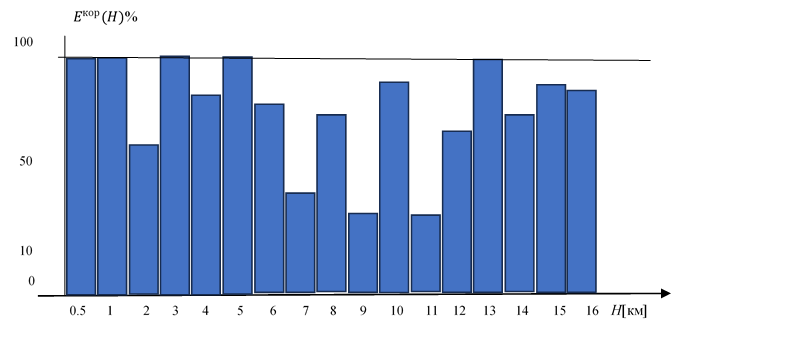
Рис. 8. Эффективность алгоритма ДЭ при корректировке недопустимых стартов
Корректировка недопустимых процессов позволила расширить область начальных условий воздушных пусков на 36% по сравнению с начальными условиями, найденными операторным методом.
Заключение
Основные результаты работы состоят в следующем:
- Разработан алгоритм ДЭ, обеспечивающий автоматический расчет коэффициентов ПИД-регуляторов, обеспечивающих реализацию допустимых стартов БЛА в широком диапазоне начальных условий старта.
- Разработан программный комплекс моделирования, на основе которого реализован процесс расчета коэффициентов ПИД-регуляторов БЛА алгоритмом ДЭ, а также проведена оценка работоспособности алгоритма.
- По результатам моделирования переходных процессов воздушных стартов показано, что использование предлагаемого подхода реализуемо и позволяет формировать допустимую область начальных стартов БЛА, составляющую (в тестовых расчетах) более 85% от всей обследуемой области начальных условий.
Литература
- Беспилотные летательные аппараты. Основы устройства и функционирования / Афанасьев П.П. [и др.]. 2-е изд. Москва: МАИ, 2008. 654 с.
- Ким Н.В., Жидков В.Н., Походенко М.В. Повышение устойчивости беспилотного летательного аппарата при нестабильных условиях полёта. Актуальные проблемы и перспективы развития гражданской авиации. Сборник трудов X Международной научно-практической конференции, 2021. С. 153-160.
- Ким Н.В., Походенко М.В. Drone stabilization during Aerial Launch. Russian Engineering Research, 2022. Published in STIN, No.12. p. 1309-1311.
- Бесекерский В.А., Попов Е.П. Теория систем автоматического управления: учеб. пособие. СПб.: Профессия, 2003. 752 c.
- Денисенко В.В. ПИД – регуляторы: вопросы реализации. Ч. 2. // Современные технологии автоматизации, 2008. №1. С. 86-97.
- Ковалевич А.А., Якимов А.И., Албкеират Д.М. Исследование стохастических алгоритмов оптимизации для применения в имитационном моделировании систем. // Информационные технологии, 2011. №8. С. 55-60.
Информация об авторах
Метрики
Просмотров web
За все время: 40
В прошлом месяце: 9
В текущем месяце: 10
Скачиваний PDF
За все время: 14
В прошлом месяце: 4
В текущем месяце: 5
Всего
За все время: 54
В прошлом месяце: 13
В текущем месяце: 15