Моделирование и анализ данных
2023. Том 13. № 2. С. 36–63
doi:10.17759/mda.2023130202
ISSN: 2219-3758 / 2311-9454 (online)
Достаточные условия существования Н∝ -наблюдателя состояния линейных непрерывных динамических систем
Аннотация
В статье рассматривается проблема нахождения Н∞ - наблюдателя вектора состояния линейных непрерывных нестационарных динамических систем при наличии неопределенности задания начальных условий, ограниченных внешних воздействий и погрешностей измерения на конечном промежутке времени. Сформулированы и на основе принципа расширения доказаны достаточные условия существования наблюдателя. Получены соотношения для нахождения параметров наблюдателя и наихудших законах изменения внешних воздействий и погрешностей измерений. Как предельный случай рассмотрена задача синтеза наблюдателя для стационарных линейных динамических систем на полубесконечном промежутке времени. Решены две прикладные задачи оценивания вектора состояния самолета по результатам неполных и неточных измерений.
Общая информация
Ключевые слова: робастное оценивание, наблюдатель состояния, условия проживания, специальные условия, принцип расширения, структурированный игровой подход
Рубрика издания: Анализ данных
Тип материала: научная статья
DOI: https://doi.org/10.17759/mda.2023130202
Получена: 12.04.2023
Принята в печать:
Для цитаты: Пантелеев А.В., Яковлева А.А. Достаточные условия существования Н∝ -наблюдателя состояния линейных непрерывных динамических систем // Моделирование и анализ данных. 2023. Том 13. № 2. С. 36–63. DOI: 10.17759/mda.2023130202
Полный текст
Введение
Задачи и методы нахождения управления составляют основу современной теории управления [1-6]. Они дополняют классические постановки задач синтеза оптимальных законов управления по различным критериям. При решении различных задач в данной области обычно применяется метод пространства состояний, частотный подход и метод линейных матричных неравенств [7-13]. Задача робастного оценивания координат вектора состояния по результатам измерений изучалась в [14-22]. Среди них выделим работу [Banavar] , в которой с помощью применения принципа максимума и игрового подхода найдены соотношения, определяющие матрицу коэффициентов усиления наблюдателя и наихудшие законы изменения возмущений и погрешностей как функции времени. В [Li, а] для решения игровой задачи предложено использовать обучение с подкреплением. Приложение теории построения робастных наблюдателей в задачах управления летательными аппаратами рассмотрено в [24,25].
В данной статье сформулированы достаточные условия синтеза наблюдателя. Доказательство построено на основе принципа расширения [26-28]. Это позволило получить выражения для управления процессом оценки вектора состояния и законы наихудшего противодействия со стороны внешних воздействий и погрешностей измерения в форме обратных связей по ошибкам оценивания. С применением полученных соотношений решены две задачи оценивания вектора состояния самолетов для нестационарной модели с конечным временем функционирования и для стационарной модели с полубесконечным временем [Chang J.-L, 2018].
Постановка задачи
Заданы математическая модель объекта управления
(1)
и модель измерительной системы
(2)
где вектор состояния, вектор возмущений, вектор выхода (вектор измерений), вектор ошибок и погрешностей измерений, время, заданное положительное число. Заданы непрерывные матрицы , размеров соответственно.
Предполагается, что:
а), ,
б) ;
в) невырожденная матрица.
Ставится задача о нахождении оценки вектора состояния по результатам накопленной информации, полученной от измерительной системы, т.е. . При этом требуется минимизировать величину ошибки оценивания в условиях неопределенности информации о векторе начальных состояний , законах изменения векторов возмущений и ошибок измерений.
Предположим, что структура наблюдателя состояния описывается уравнением
, (3)
где вектор оценок координат вектора состояния, неизвестная непрерывная матрица размеров вектор начальных значений оценок координат вектора состояния, задаваемый исходя из имеющейся априорной информации о возможных начальных состояниях модели объекта управления (1). Матрица выполняет функцию управления процессом наблюдения.
Получим уравнение, описывающее изменение ошибки оценивания, вычитая из уравнения (1) уравнение (3) с учетом (2) и обозначения :
,
, . (4)
Далее для упрощения записи зависимость матриц математической модели от времени опущена. Также будет использоваться обозначение взвешенной нормы где заданная положительно полуопределенная симметрическая матрица.
Требуется обеспечить (если это возможно) выполнение неравенства:
(5)
где симметрические положительно определенные матрицы соответствующих размеров, заданное неотрицательное число. При этом желательно найти минимальное значение , при котором указанные свойства еще справедливы, минимизируя значение числителя дроби при одновременной максимизации знаменателя.
Иными словами, функционал качества управления наблюдателем состояния должен удовлетворять условию
, (6)
которое будет выполняться при минимизации затрат на управление процессом оценивания при наихудшем влиянии возмущений, начального состояния и ошибок измерений. Множитель ½ добавлен для уменьшения громоздкости записи после дифференцирования.
Требуется найти наилучшую матрицу наблюдателя (3), наихудшие законы управления внешним воздействием и погрешностью измерений , наихудший вектор начальных состояний , обеспечивающие выполнение условия (6).
Синтез наблюдателей состояния
Сформулируем поставленную задачу как игровую, где первый игрок – матрица , выбирается при каждом из условия минимизации значения функционала, а второй игрок ‑ составной вектор , из условия его максимизации:
. (7)
Будем считать, что второй игрок при фиксированном действии первого игрока стремится максимизировать величину функционала, характеризующую интегральную ошибку оценивания. Поэтому сначала рассмотрим задачу максимизации функционала по , или, что то же самое, минимизации функционала, отличающегося знаком:
(8)
Будем использовать достаточные условия оптимальности В.Ф.Кротова [26,27] для задачи
,
где – вектор состояния системы, – вектор управления, – некоторое заданное множество; – время, – промежуток времени функционирования системы, моменты времени и заданы, ; внешние воздействия на объект управления отсутствуют, – непрерывно дифференцируемая функция; множество допустимых процессов, т. е. множество пар образуемых траекториями и управлениями , в которых , функции непрерывны и кусочно-дифференцируемы, а кусочно-непрерывны, удовлетворяют дифференциальному уравнению системы и начальному условию.
Утверждение (частный случай достаточных условий оптимальности [26,27]). Для того чтобы элемент был минималью, достаточно существования такой функции , чтобы выполнялись два условия:
- ,
где
(9)
(10)
Функцию и величину без ограничения общности можно положить равными нулю. При этом минимальное значение функционала .
Доказательство. Применим принцип расширения [26-28]. Определим множество пар где элементы пар по сравнению с входящими в множество необязательно связаны дифференциальным уравнением , , допускаются разрывы первого рода функций на множестве . Таким образом, множество и расширение построено.
Доопределение функционала на множестве производится с помощью задания функции . На множестве определим функционал: .
На множестве , где между функциями существует дифференциальная связь, с учетом равенства справедливо
и поэтому
Таким образом, на множестве функционалы и совпадают. Поведение функционала на множестве полностью определяется выбором функции .
Пусть имеется функция . Найдем минимум функционала на множестве . Операции нахождения экстремума в первых двух слагаемых могут быть выполнены по отдельности в силу свойств функций , образующих пары . Тогда .
Из условий 1) и 2) следует, что , т.е. .Поскольку , то . Но на множестве справедливо тождество . Поэтому , что соответствует определению минимума функционала на множестве .
Если существует функция , удовлетворяющая условиям 1), 2) утверждения при то, применяя прямую подстановку в , , можно показать, что функция также удовлетворяет этим условиям при , . В этом случае из доказанного утверждения и выражения для следует .
Доказательство закончено.
Замечание 1. В решаемой задаче .
Пусть имеется функция . Составим конструкции (9),(10) для функционала (8) и модели динамической системы, описываемой уравнением (4) для ошибки оценивания:
(11)
где .
Используем правила векторного дифференцирования [Бортаковский, 2010]: (если матрица симметрическая, то ), и свойства операции транспонирования .
Найдем максимум функции по переменным , используя необходимые условия безусловного экстремума: , .
Отсюда
, . (12)
Проверим выполнение достаточных условий максимума: ,
так как , , а определитель блочно-диагональной матрицы равен произведению определителей блоков.
Тогда
Так как для матриц-столбцов справедливо равенство , то можно использовать правила нахождения матричных градиентов [Гроп, 1979]: .
Заметим, что .
Тогда
Отсюда
(13)
Будем искать функцию в форме
, (14)
где неизвестная симметрическая матрица порядка .
Тогда и из (12),(13) получаем
, , (15)
(16)
Запишем равенство 1) из достаточных условий оптимальности с учетом , подставляя в выражение вместо формулу (16), т.е.
Используя условие равенства нулю квадратичной формы , получаем
С учетом равенства имеем и . Тогда, умножая уравнение на матрицу слева и справа, получаем
или (17)
Выпишем условие 2) из достаточных условий оптимальности
Отсюда следует граничное условие для уравнения (17):
. (18)
Частный случай (линейные стационарные системы с полубесконечным промежутком функционирования).
Рассмотрим случай, когда матрицы системы (1),(2) не зависят от , а момент окончания процесса функционирования системы :
Структура наблюдателя состояния (3) имеет вид .
Требуется обеспечить (если это возможно) выполнение неравенства:
где симметрические положительно определенные матрицы соответствующих размеров, заданное неотрицательное число.
Тогда
(19)
, ,
где матрица положительно определенное решение алгебраического уравнения Риккати
(20)
Замечание 2. В правую часть математической модели объекта (1) может входить слагаемое с управлением:
при этом модель измерительной системы остается без изменений:
где вектор состояния, вектор возмущений, вектор управлений; вектор выхода (вектор измерений), вектор ошибок и погрешностей измерений, время, заданное положительное число. Заданы непрерывные матрицы , размеров соответственно.
Тогда структура наблюдателя состояния описывается уравнением
. (21)
При этом уравнение, описывающее изменение ошибки оценивания, не изменяется, и сохраняются формулы для нахождения .
Пример 1
Рассмотрим задачу синтеза наблюдателя в системе управления самолетом L-1011 [Chang J.-L, 2018], описываемой моделью нестационарной системы на конечном промежутке времени. В рассматриваемой задаче , , .
Тогда уравнение модели объекта управления (1) имеет вид
Уравнение измерительной системы (2):
где погрешности измерений описываются выражением:
Закон управления самолетом имеет вид [Chang J.-L, 2018]
где функция удовлетворяет дифференциальному уравнению
Уравнение для синтеза наблюдателя с учетом замечания 2 принимают форму
При решении задачи предлагается применить следующую методику.
- Найти матрицу решение дифференциального уравнения Риккати
2.Найти матрицу коэффициентов усиления наблюдателя
- Найти наихудшие законы изменения возмущения и погрешности измерений: .
- Оценить эффективность наблюдателя, исследуя динамику изменения ошибки наблюдения:
Для этого моделировать работу наблюдателя при ограниченных возмущениях и погрешностях измерений вида
где положительные числа.
Матрицы , и в (5) подбираются таким образом, чтобы обеспечивать корректный синтез наблюдателя в системе, а также желаемый вид переходных процессов в системе. Вид внешних воздействий и погрешностей измерения, а также подобранные матрицы, представлены в табл. 1.
Таблица 1
Параметры моделировани
На рис. 1-3 отражены результаты моделирования системы управления совместно с наблюдателем состояния при различных начальных условиях:
а) , б) .
Начальные условия для оценки вектора состояния: .
|
а) |
б) |
|
Рис.1 Переходные процессы для координаты и ее оценки |
|
|
а) |
б) |
|
Рис.2 Переходные процессы для координаты и ее оценки |
|
|
а) |
б) |
|
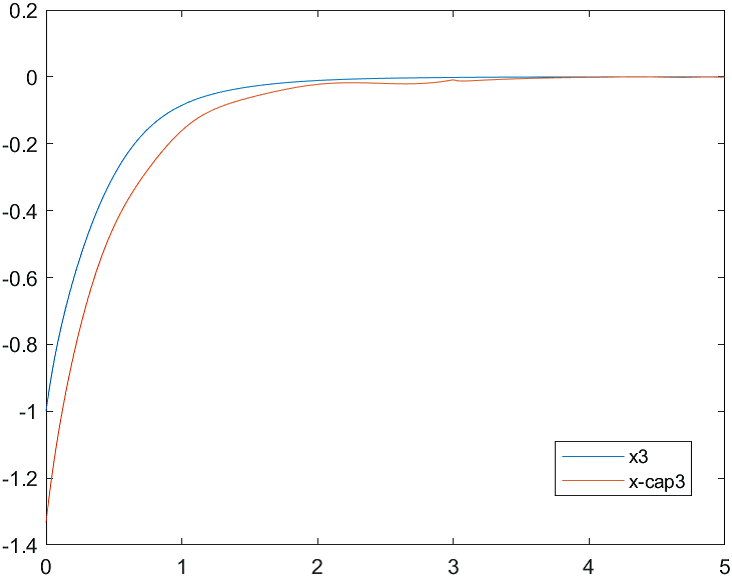
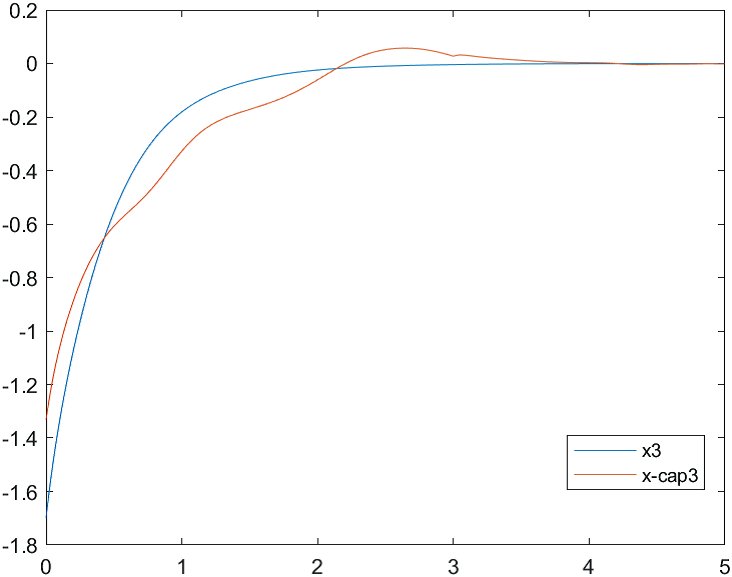
Рис.3 Переходные процессы для координаты и ее оценки |
|
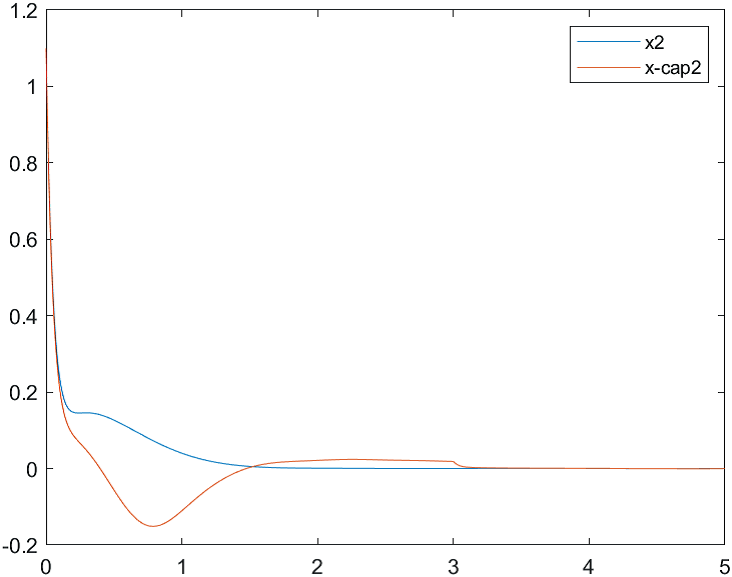
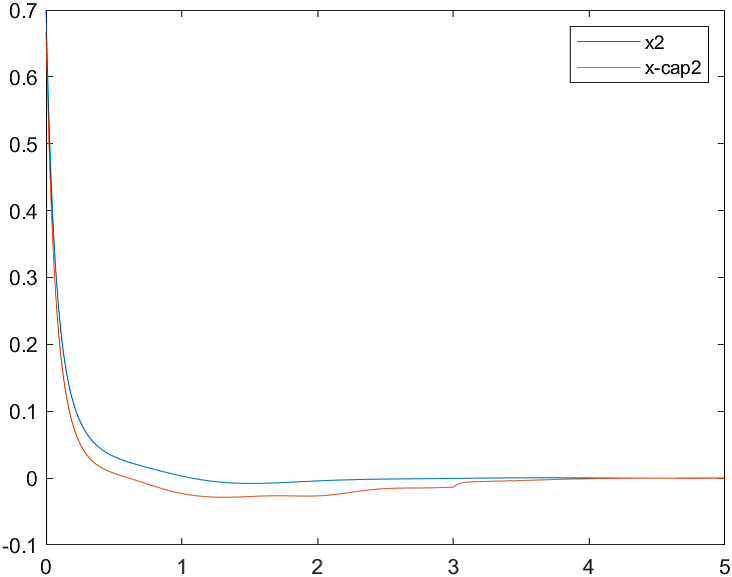
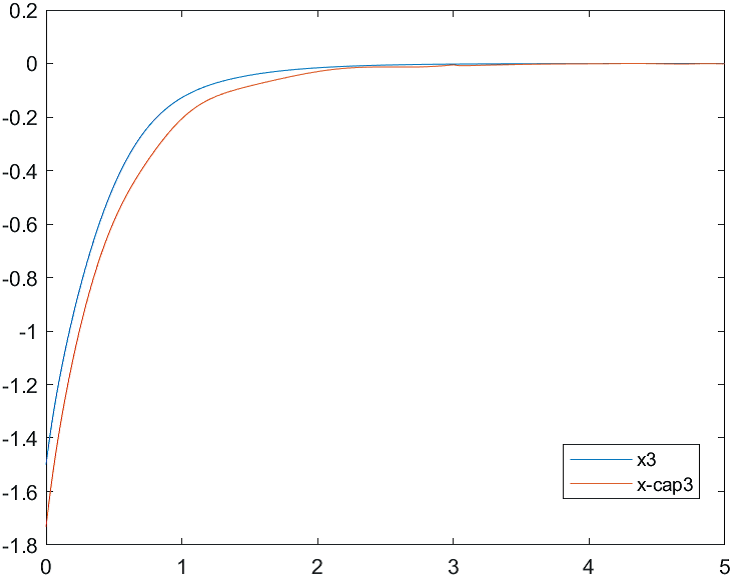
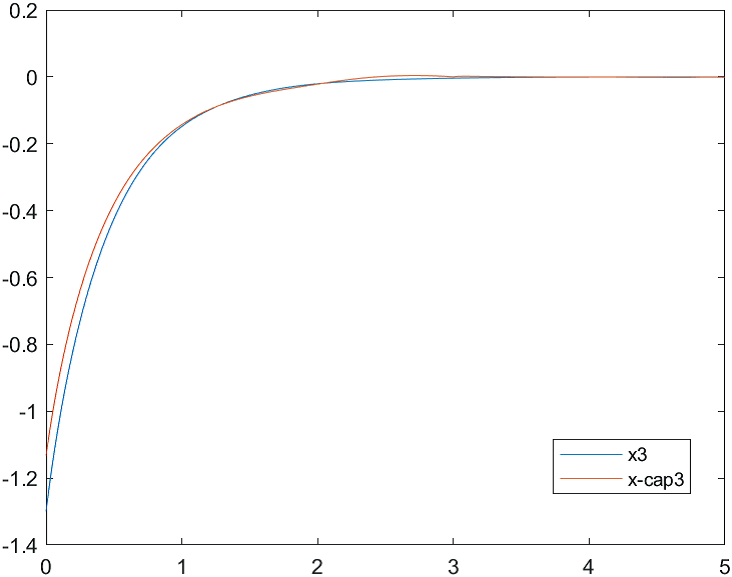
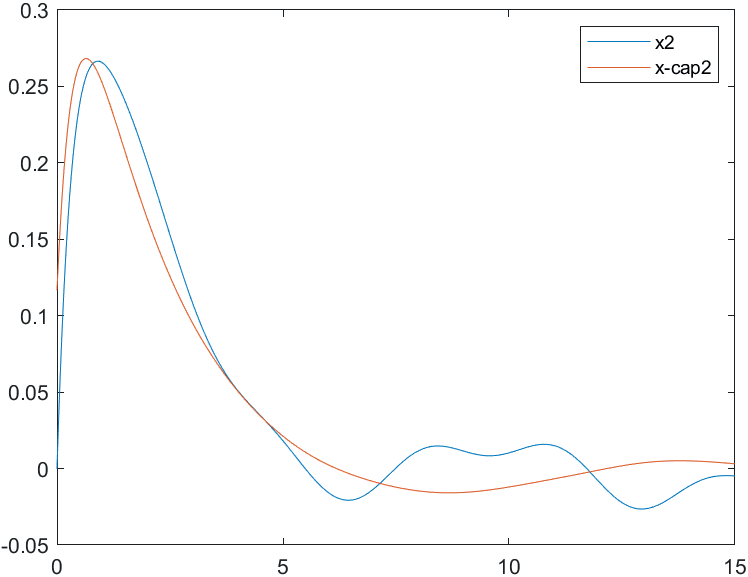
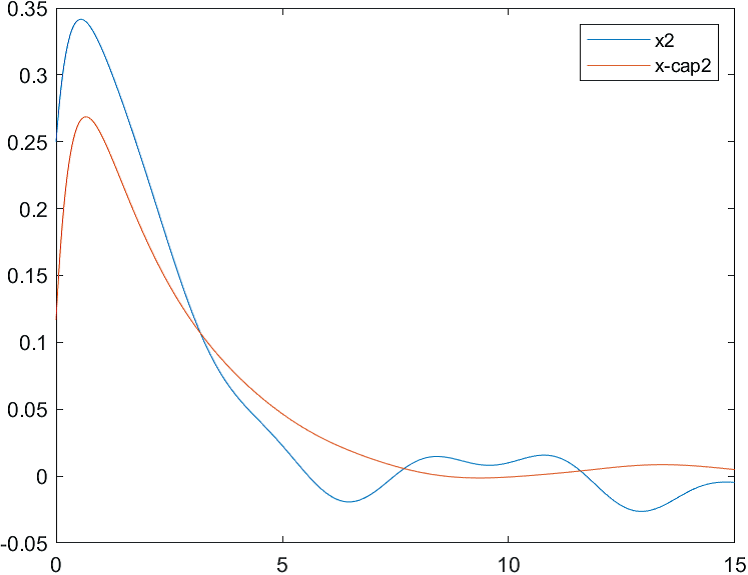
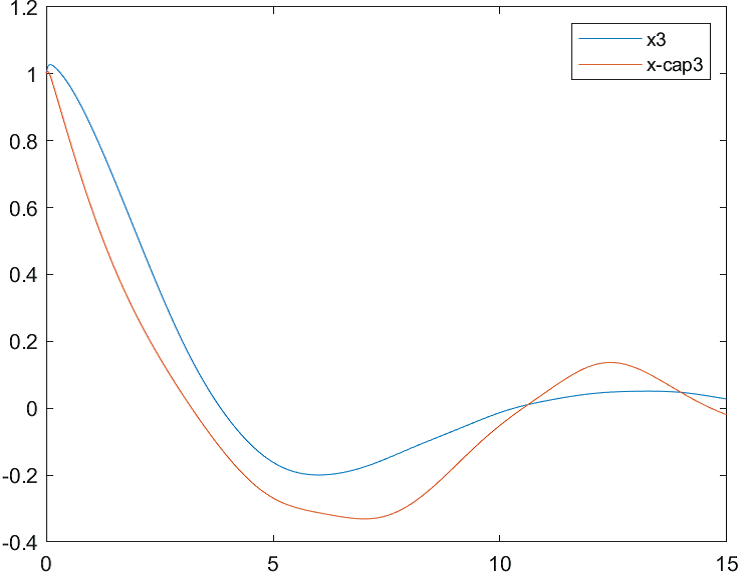
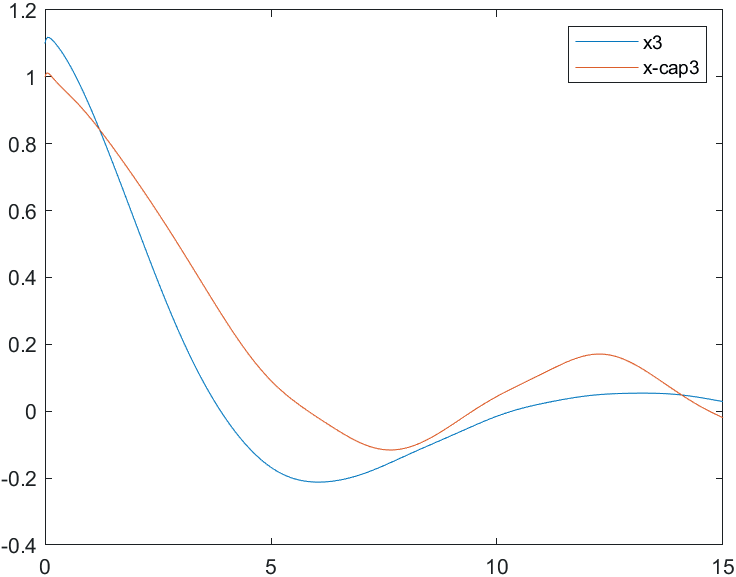
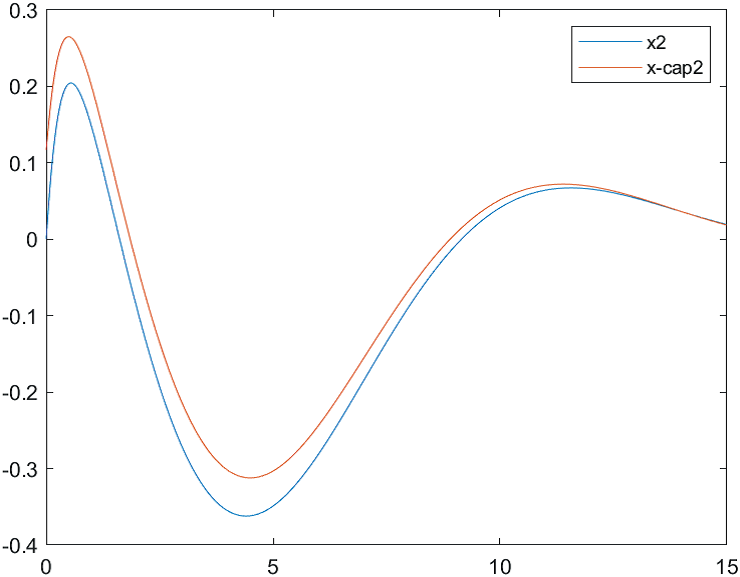
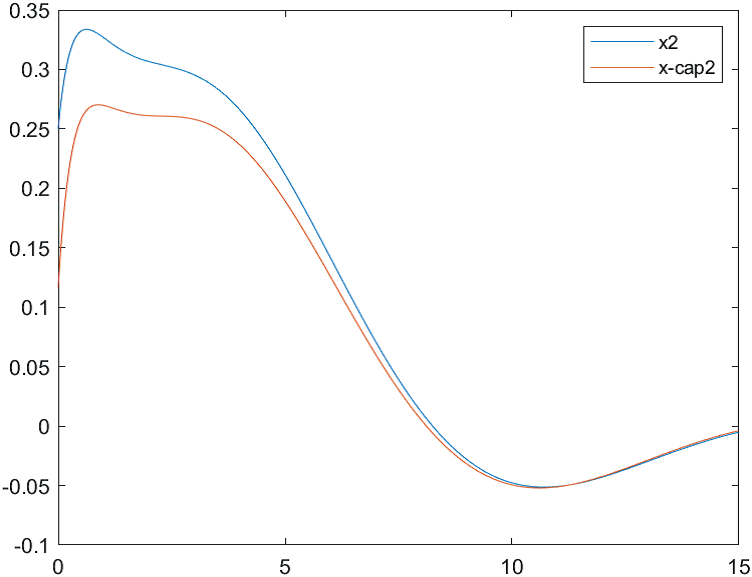
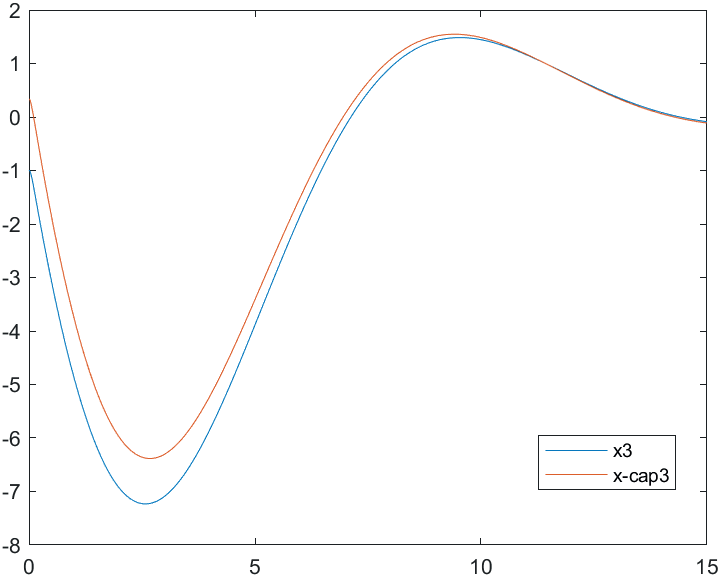
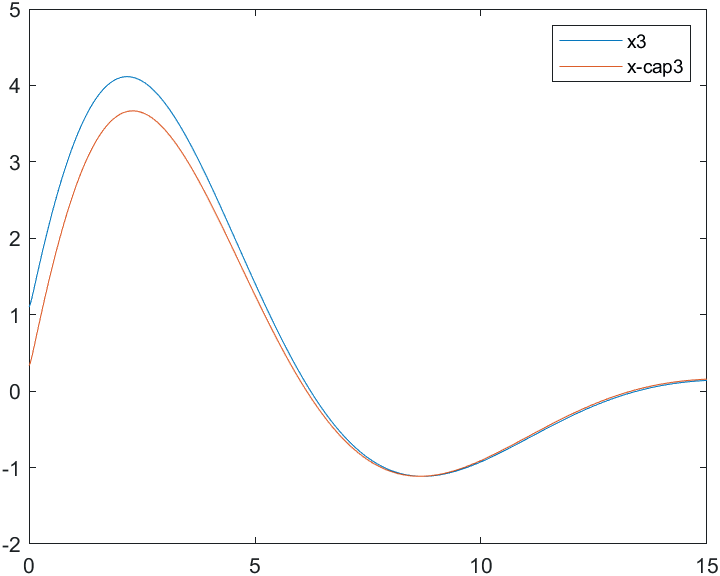
На рис. 4-6 представлены результаты моделирования системы с двумя различными начальными условиями для вектора состояния объекта и вектора его оценок:
а) , ;
б) , .
|
а) |
б) |
|
Рис.4 Переходные процессы для координаты и ее оценки |
|
|
а) |
б) |
|
Рис.5 Переходные процессы для координаты и ее оценки |
|
|
а) |
б) |
|
Рис.6 Переходные процессы для координаты и ее оценки |
|
На рис. 7-9 представлены результаты моделирования системы с двумя различными начальными условиями: а) , б) .
Начальные условия для оценки вектора состояния: .
|
а) |
б) |
|
Рис.7 Переходные процессы для координаты и ее оценки |
|
|
а) |
б) |
|
Рис.8 Переходные процессы для координаты и ее оценки |
|
|
а) |
б) |
|
Рис.9 Переходные процессы для координаты и ее оценки |
|
Анализ полученных результатов моделирования позволяет судить о стремлении ошибки оценивания к нулю при различных начальных условиях движения (при изменении параметра М переходные процессы аналогичны представленным).
Пример 2
Рассмотрим задачу синтеза наблюдателя в системе управления самолетом L-1011 [Chang J.-L, 2018], описываемой моделью стационарной системы на полубесконечном промежутке времени. В рассматриваемой задаче , , .
Тогда уравнение модели объекта управления (1) имеет вид.
Уравнение измерительной системы (2): .
Возмущение , а погрешность измерений:
Закон управления [Chang J.-L, 2018] имеет вид ,
где
При решении задачи предлагается применить следующую методику.
- Найти матрицу положительно определенное решение алгебраического уравнения Риккати
- Найти матрицу коэффициентов усиления наблюдателя
- Найти наихудшие законы изменения возмущения и погрешности измерений: , . (22)
- Оценить эффективность наблюдателя, исследуя динамику изменения ошибки наблюдения: , .
Для этого моделировать работу наблюдателя при ограниченных возмущениях и погрешностях измерений вида:
где положительные числа.
Матрицы , и в (5) подбираются таким образом, чтобы обеспечивать корректный синтез наблюдателя в системе, а также желаемый вид переходных процессов. Вид внешних воздействий и погрешностей измерения, а также подобранные матрицы, представлены в табл. 2.
Таблица 2
Параметры моделирования
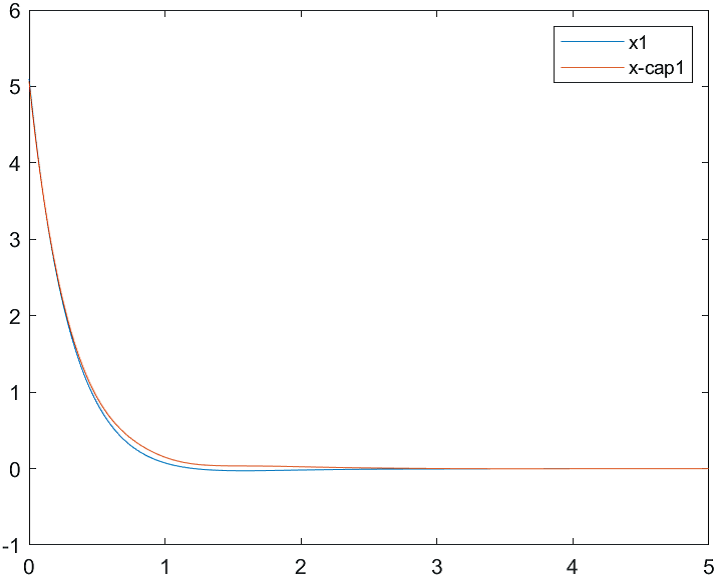
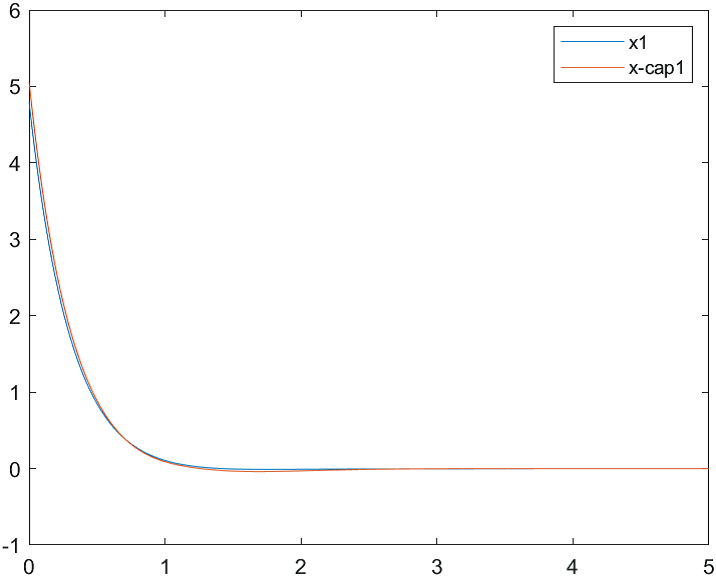
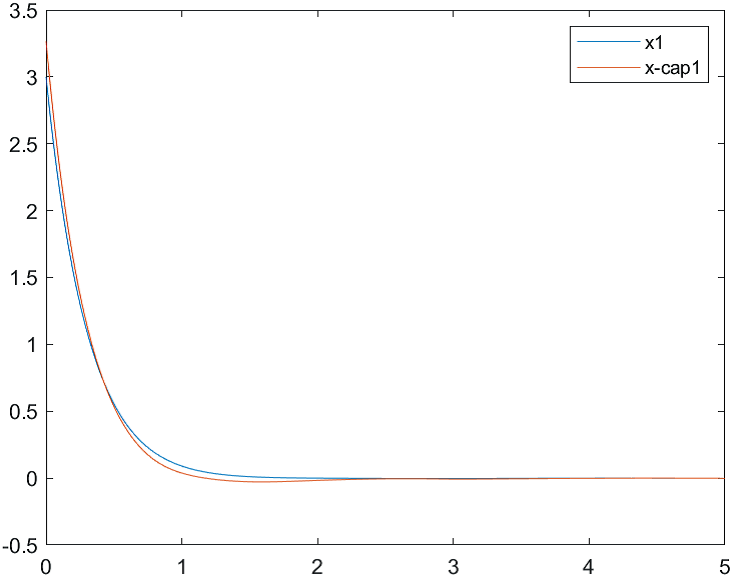
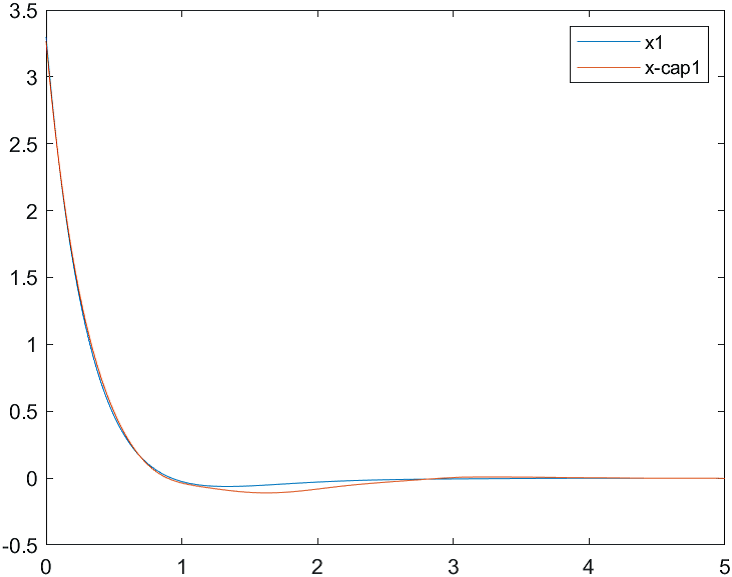
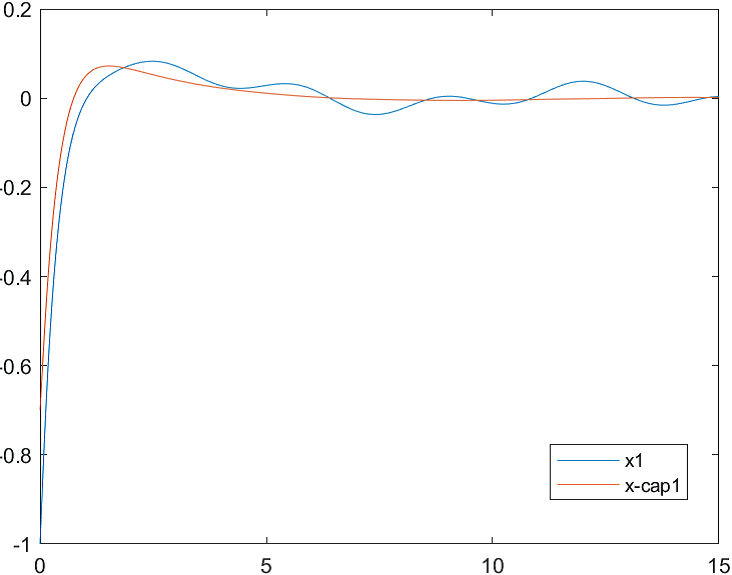
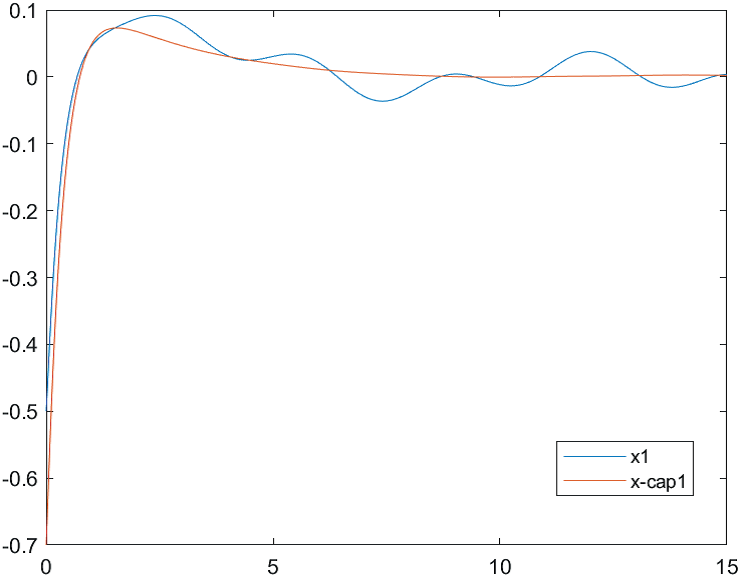
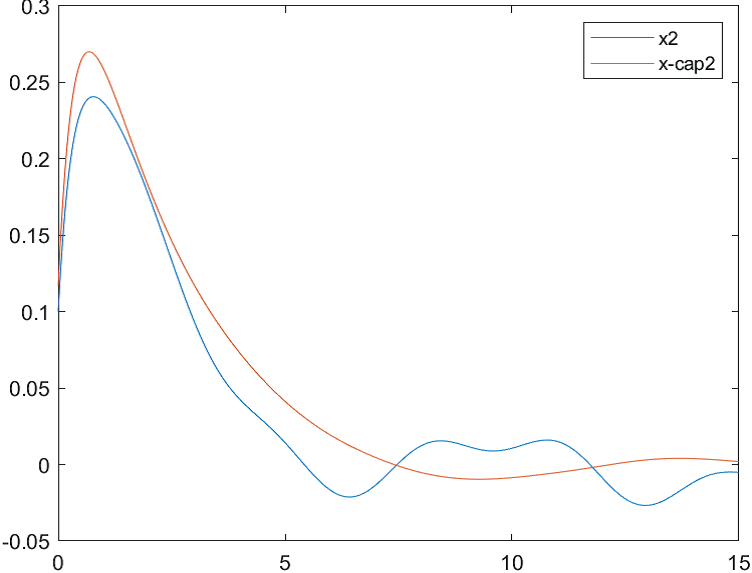
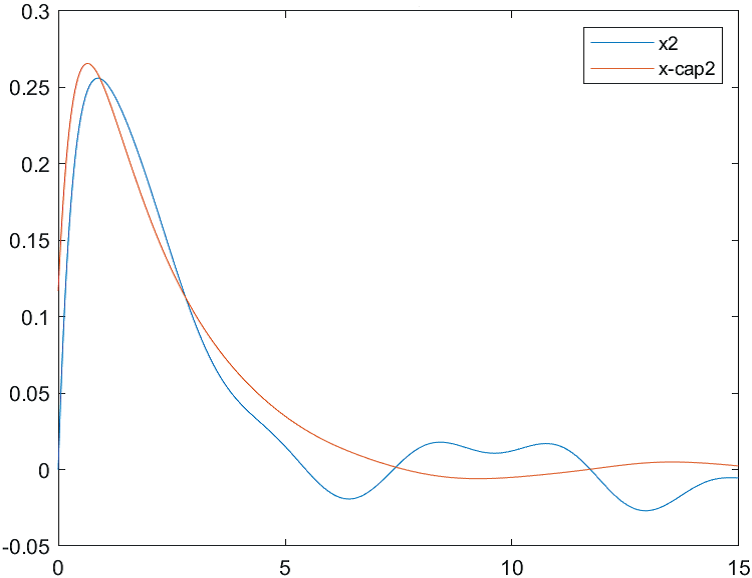
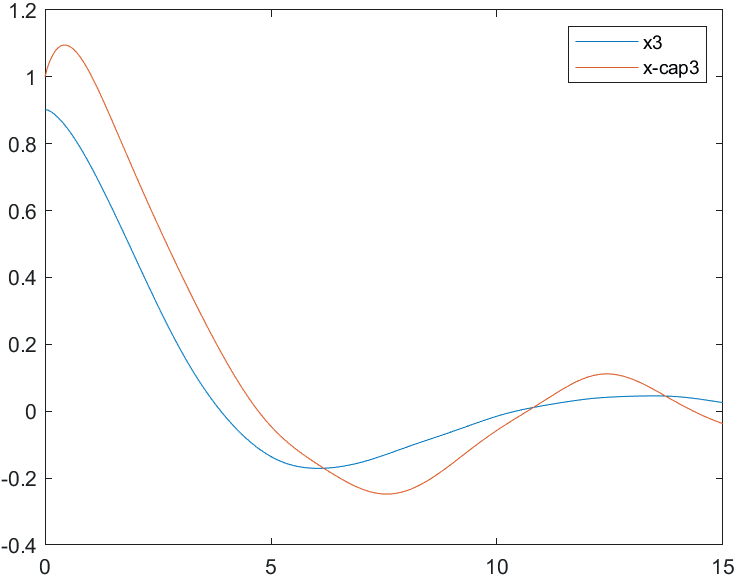
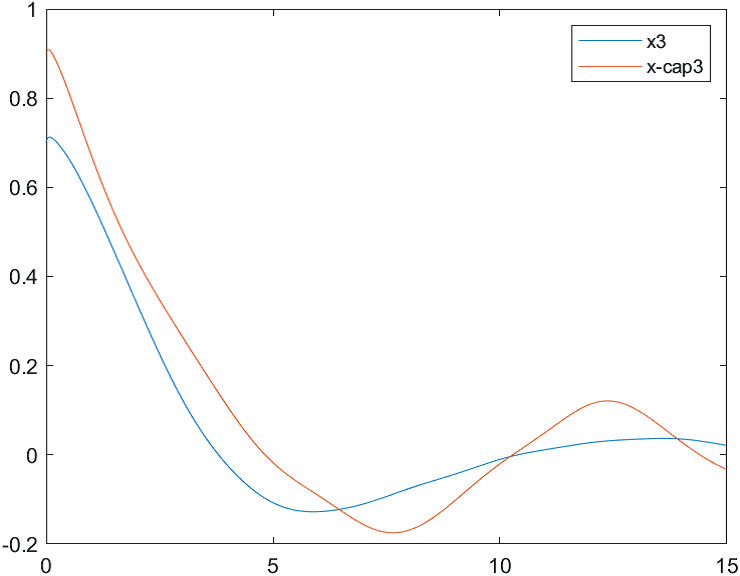
На рис. 10-13 представлены результаты моделирования системы с различными начальными условиями: а) , б) .
Начальные условия для оценки вектора состояния: .
|
а) |
б) |
|
Рис.10 Переходные процессы для координаты и ее оценки |
|
|
а) |
б) |
|
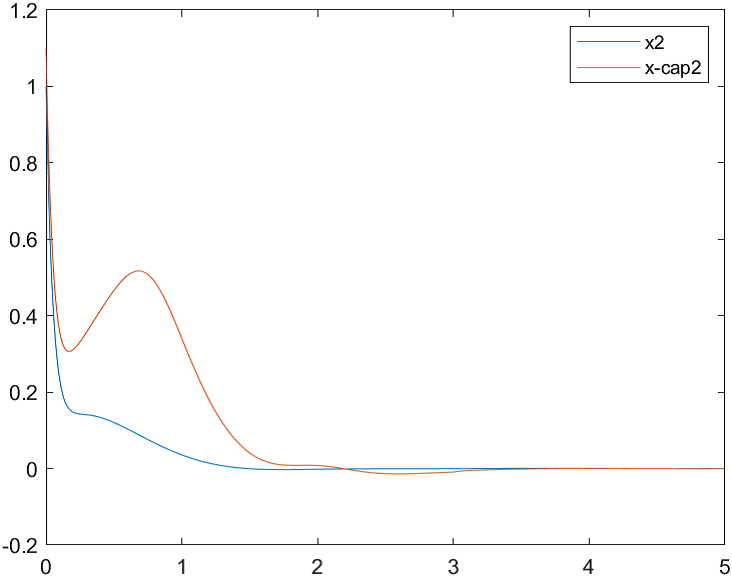
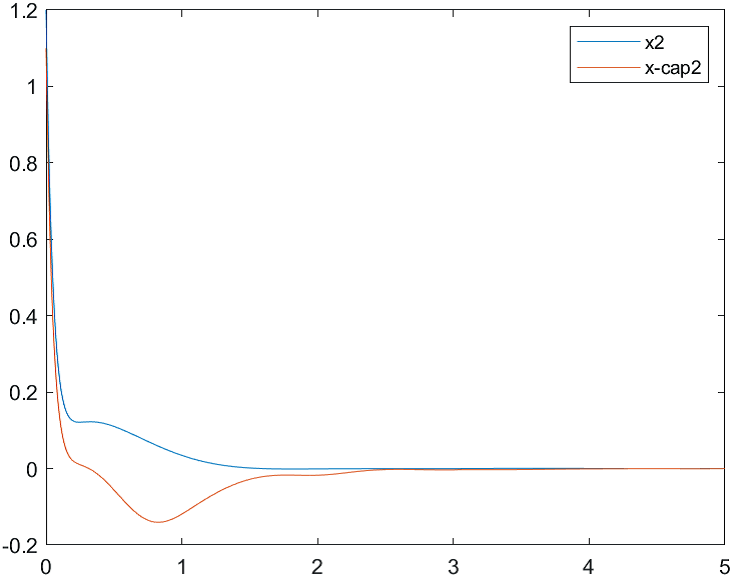
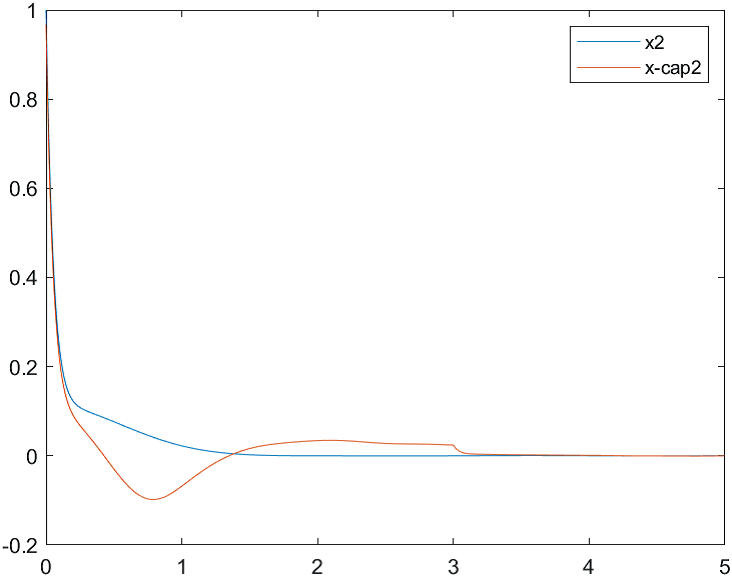
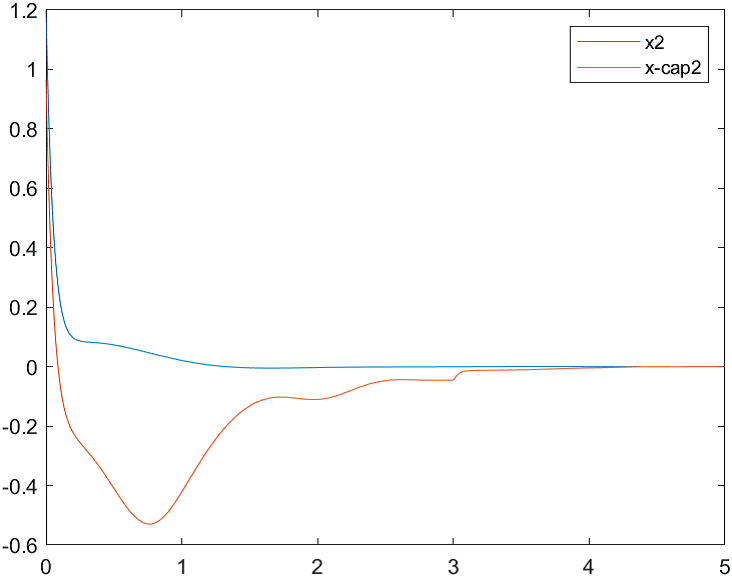
Рис.11 Переходные процессы для координаты и ее оценки |
|
|
а) |
а) |
|
Рис.12 Переходные процессы для координаты и ее оценки |
|
|
а) |
а) |
|
Рис.13 Переходные процессы для координаты и ее оценки |
|
На рис. 14-17 представлены результаты моделирования системы с различными начальными условиями для вектора состояния и его оценки:
а)
б)
|
а) |
б) |
|
Рис.14 Переходные процессы для координаты и ее оценки |
|
|
а) |
а) |
|
Рис.15 Переходные процессы для координаты и ее оценки |
|
|
а) |
а) |
|
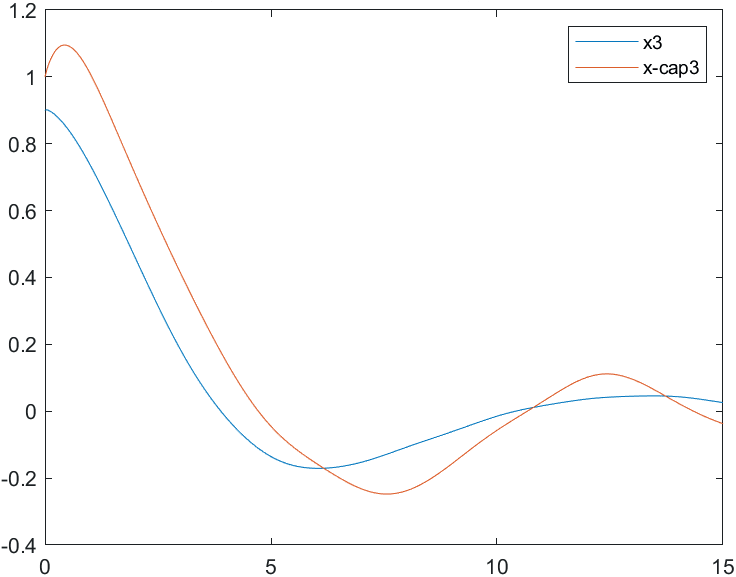
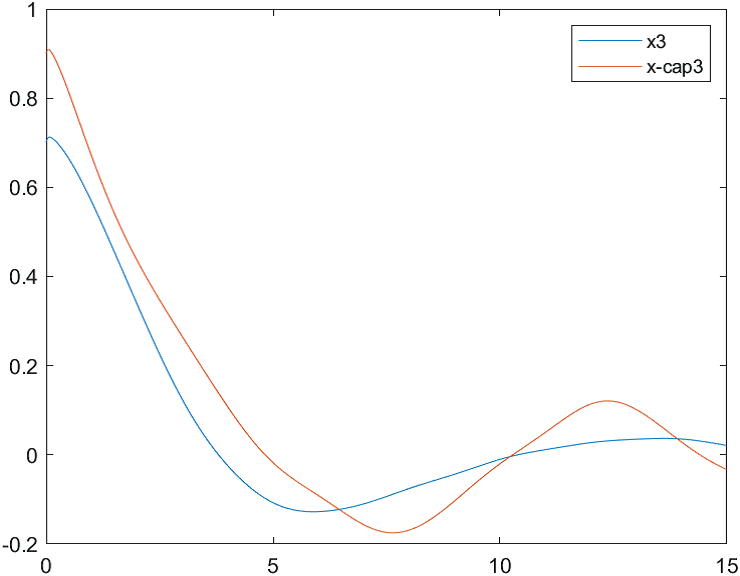
Рис.16 Переходные процессы для координаты и ее оценки |
|
|
а) |
а) |
|
Рис.17 Переходные процессы для координаты и ее оценки |
|
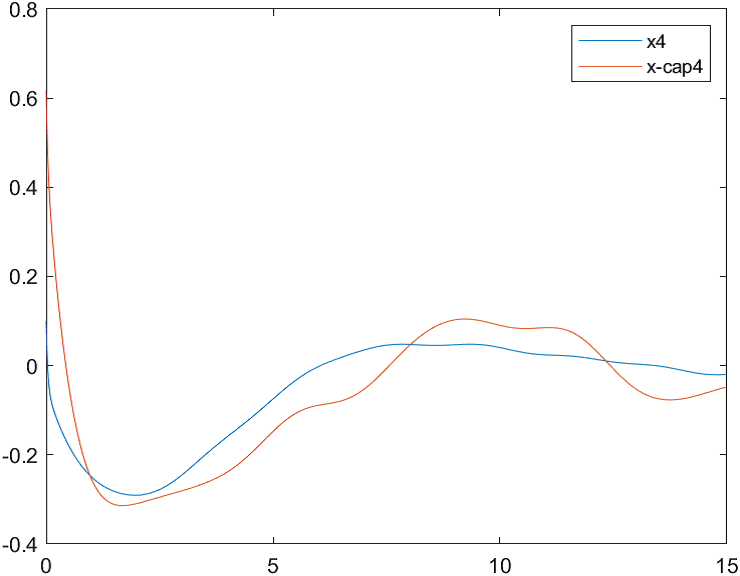
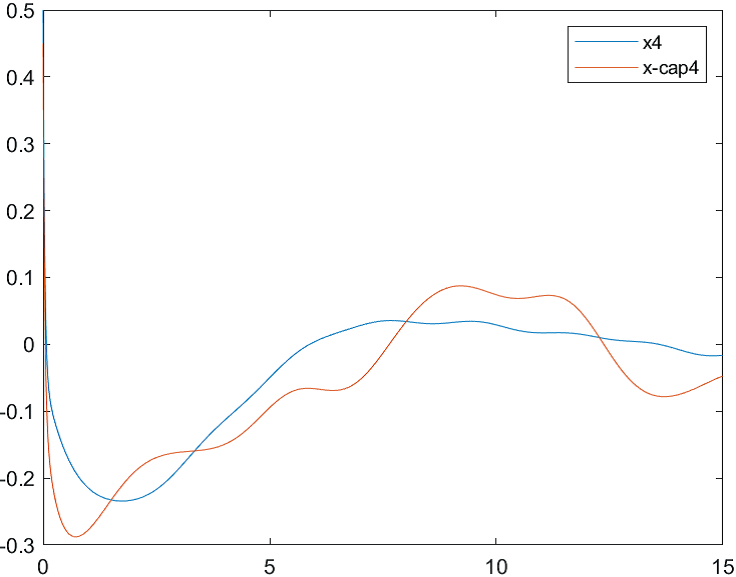
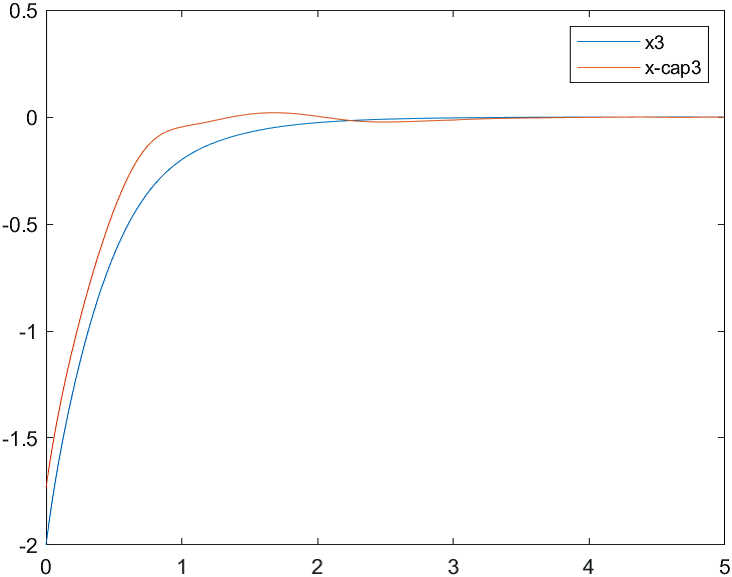
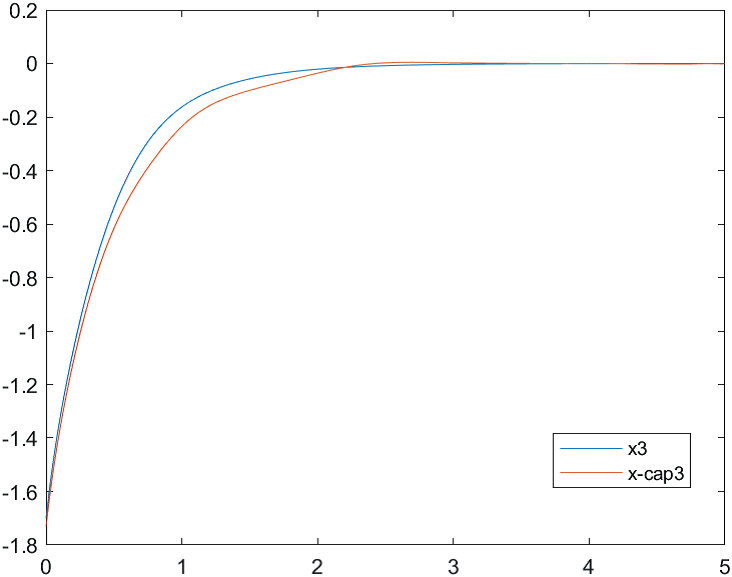
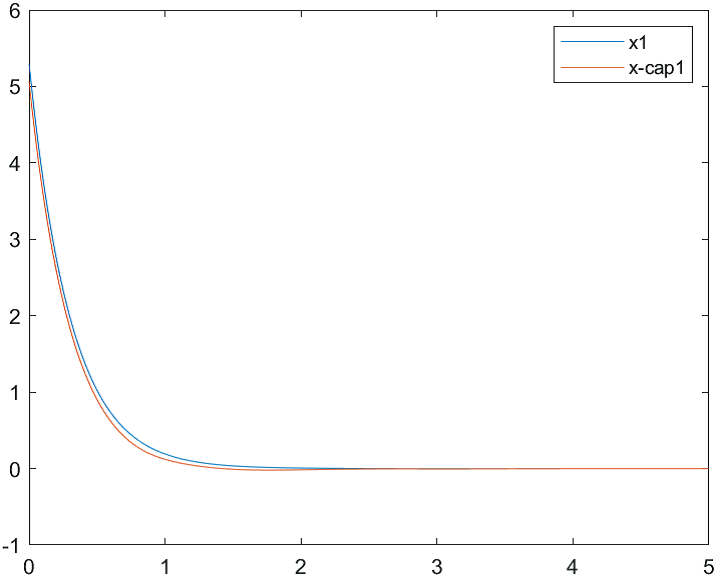
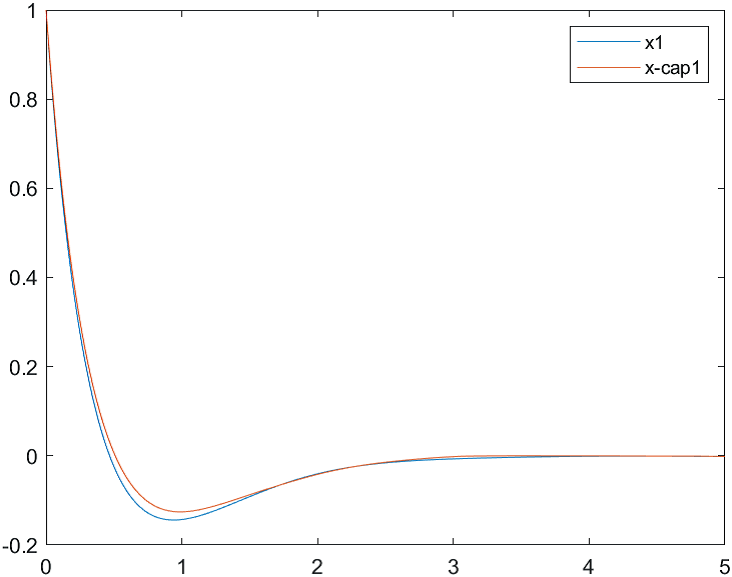
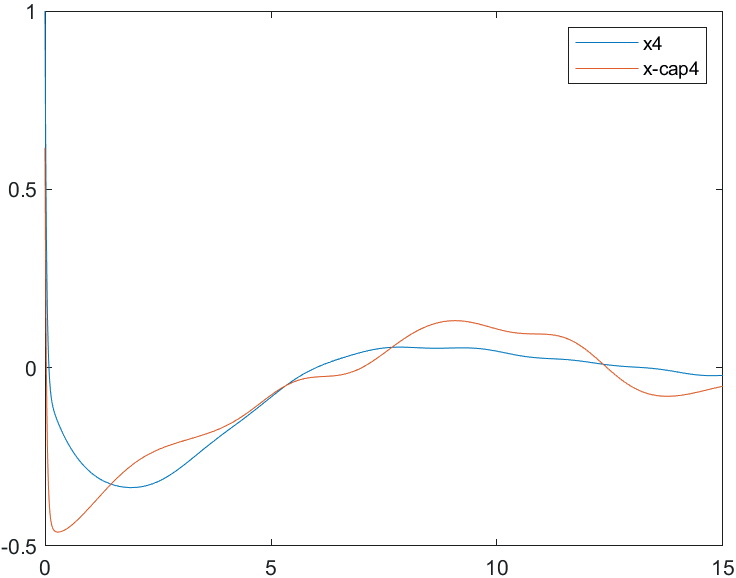
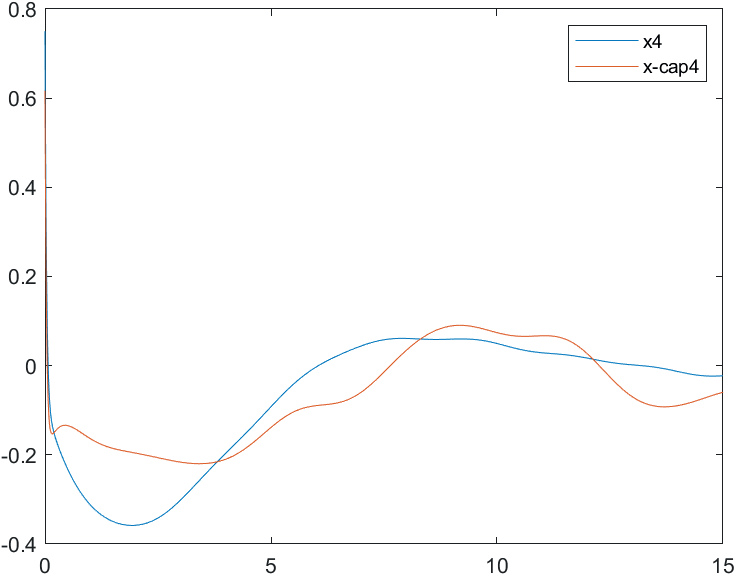
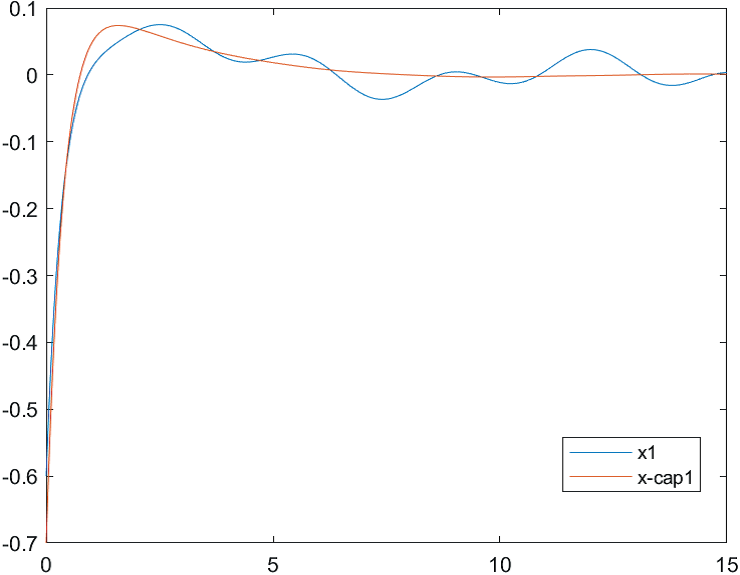
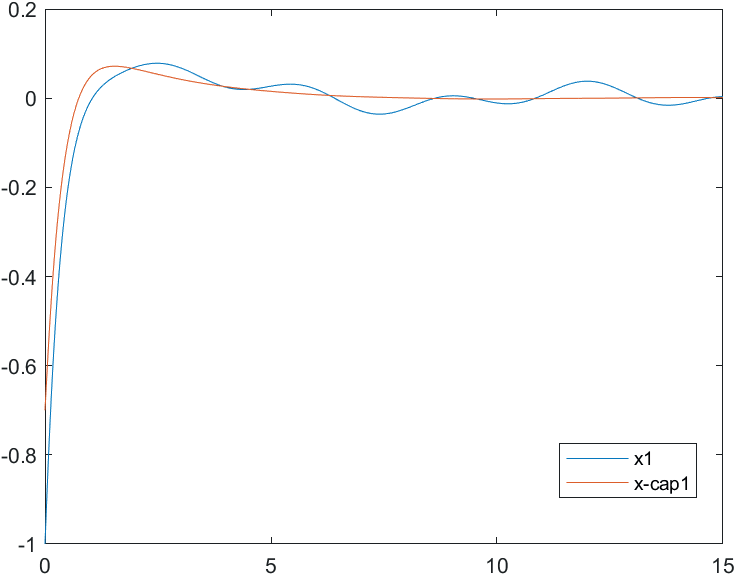
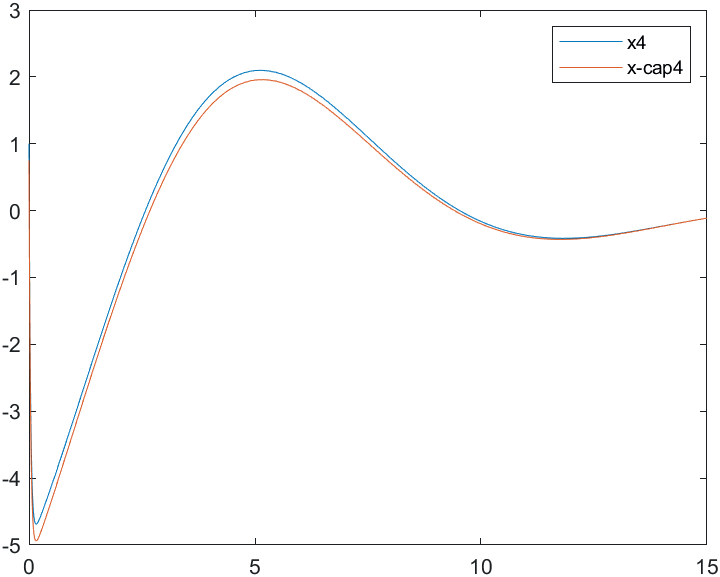
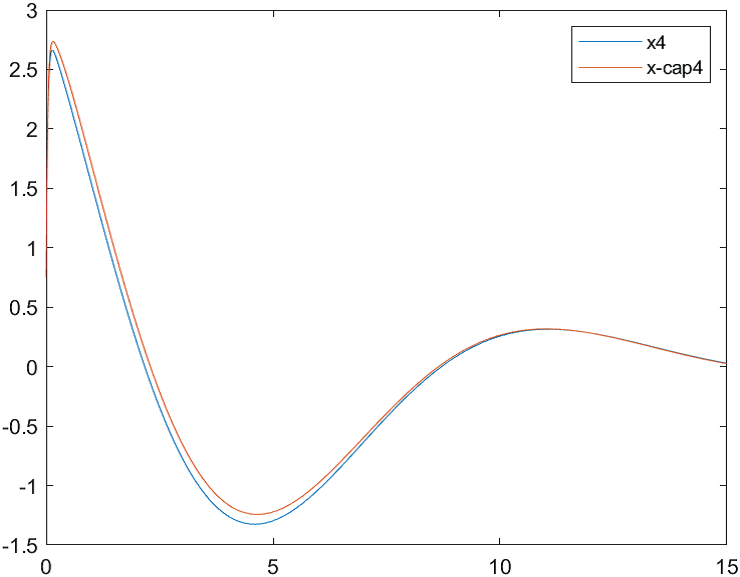
На рис. 18-21 представлены результаты моделирования системы при воздействии на систему наихудших возмущений и погрешностей измерений (22). Начальные условия для вектора состояния объекта и оценки вектора состояния:
а)
б)
|
а) |
б) |
|
Рис.18 Переходные процессы для координаты и ее оценки |
|
|
а) |
а) |
|
Рис.19 Переходные процессы для координаты и ее оценки |
|
|
а) |
а) |
|
Рис.20 Переходные процессы для координаты и ее оценки |
|
|
а) |
а) |
|
Рис.21 Переходные процессы для координаты и ее оценки |
|
На основании рис. 10-21 можно сделать вывод, что предложенный подход к синтезу наблюдателя системы позволяет получить достаточно точную оценку координат вектора состояния и желаемое качество переходных процессов в условиях неполной информации о состоянии объекта, ограниченных начальных условиях, внешних воздействиях и погрешностях измерений.
Для произведения вычислений и моделирования использовалась система компьютерной математики MATLAB.
Заключение
В статье сформулированы и на основе принципа расширения доказаны достаточные условия существования наблюдателя. Получены соотношения для нахождения параметров наблюдателя и наихудших законов изменения внешних воздействий и погрешностей измерений. Решены две прикладные задачи оценивания вектора состояния самолета по результатам неполных и неточных измерений. На основании полученных результатов можно сделать вывод, что предложенный подход к синтезу наблюдателя позволяет получить достаточно точную оценку вектора состояния, обеспечивает желаемое качество переходных процессов и обеспечить асимптотическую устойчивость системы в условиях неполной информации. Предложенный метод оценивания вектора состояния может быть применен к различным задачам управления, например, при проектировании автопилотов или систем автоматической навигации летательных аппаратов.
Литература
- Koobloch H. W., Isidori A.. Flockerzi D. Topics in control theory. DMV-Seminar; Bd. 22, Basel; Springer, 1993.
- Doyle J., Francis B., Tannenbaum A. Feedback Control Theory. Macmillan Publishing Co, 1990.
- Skogestad S., Postlethwaite I. Multivariable Feedback Control: Analysis and Design. John Wiley and sons, 2005.
- Поляк Б.Т., Щербаков П.С. Робастная устойчивость и управление. М.: Наука, 2002.
- Green M., Limebeer D.J.N. Linear Robust Control. Dover Publications, 2012.
- Simon D. Optimal State Estimation. Kalman, , and Nonlinear Approaches. John Wiley and sons, 2006.
- Курдюков А. П., Андрианова О. Г., Белов А. А., Гольдин Д. А. Между и теориями управления // Автоматика и телемеханика. 2021. № 4, C. 8–76.
- Баландин Д.В., Коган М.М. Синтез законов управления на основе линейных матричных неравенств. М.: Физматлит, 2007.
- Поляк Б.Т., Хлебников М.В., Щербаков П.С. Управление линейными системами при внешних возмущениях: Техника линейных матричных неравенств. М.: URSS/ЛЕНАНД, 2014.
- Хлебников М.В., Поляк Б.Т., Кунцевич В.М. Оптимизация линейных систем при ограниченных внешних возмущениях (техника инвариантных эллипсоидов) // Автоматика и телемеханика. 2011. № 11, С. 9–59.
- Поляк Б.Т., Хлебников М.В., Рапопорт Л.Б. Математическая теория автоматического управления. М.: URSS/ЛЕНАНД, 2019.
- Gadewadikar J., Lewis F.L., Abu-Khalaf M. Necessary and Sufficient Conditions for H-infinity Static Output-Feedback Control // Journal of Guidance, Control, and Dynamics. Vol.29, no. 4, 915–920 (2006).
- Chang J.-L., Wu T.-C. Dynamic Compensator-Based Output Feedback Controller Design for Uncertain Systems with Adjustable Robustness // Journal of Control Science and Engineering. Vol. 2018, Article ID 5806787.
- Баландин Д.В., Коган М.М. Минимаксный подход к синтезу оптимального управления при неопределенных начальных условиях // Автоматика и телемеханика. 2009. № 11, C. 3–12.
- Баландин Д. В., Коган М. М. Минимаксная фильтрация: -оптимальные наблюдатели и обобщенные -оптимальные фильтры // Автоматика и телемеханика. 2013. № 4, С. 43–58.
- Баландин Д. В. , Коган М. М. Управление и оценивание в линейных нестационарных системах на основе эллипсоидальных множеств достижимости // Автоматика и телемеханика. 2020. №8, C. 8–28.
- Basar T., Bernhard P. H∞-Optimal Control and Related Minimax Design Problems: a Dynamic Game Approach. Birkhauser: Boston, 1995.
- Shaked U.,Theodor Y. -optimal estimation: a tutorial // Proc. 31st IEEE Conf. Decision Contr., New York, NY, USA, Vol.2, 2278–2286 (1992).
- Banavar R. N , Speyer J. L. A linear-quadratic game approach to estimation and smoothing // Proceedings of the American Control Conference, Evanston, IL, USA, 2818–2822 (1991).
- Yaesh I., Shaked U. Game theory approach to optimal linear state estimation and its relation to the minimum H1-norm estimation // IEEE Trans. Automat. Contr., Vol. 37, no. 6, 828–831 (1992).
- Wu A., Dong H., Duan G. Improved robust H-infinity estimation for uncertain continuous-time systems // J. Syst. Sci. Complex., Vol. 20, no. 3, 362–369 (2007).
- Li H., Fu M. A linear matrix inequality approach to robust H1 filtering // IEEE Trans. Signal Processing, Vol. 45, no. 9, 2338–2350 (1997).
- Li J., Li S. E., Tang K., Lv Y., Cao W. Reinforcement solver for H-infinity filter with bounded noise // 2020 15th IEEE International Conference on Signal Processing (ICSP), Vol. 1, 62–67 (2020).
- Shue S., Agarwal R.K. Design of automatic landing systems using mixed control // J. of Guidance, Control and Dynamics, 22, 103–114 (1999).
- Lungu R., Lungu M. Control of the aircraft lateral-directional motion during landing using the control and the dynamic inversion // Proc. Of the Romanian Academy Ser. A, Vol. 16 , no.64, 547-555 (2015).
- Кротов В.Ф., Гурман В.И. Методы и задачи оптимального управления. М.: Наука, 1973.
- Гурман В.И. Принцип расширения в задачах управления. М.: Наука, 1985.
- Пацюков В.П. Дифференциальные игры при различной информированности игроков. М.: Советское радио, 1976.
- Бортаковский А.С., Пантелеев А.В. Линейная алгебра в примерах и задачах. М.: Высшая школа, 2010.
- Гроп Д. Методы идентификации систем. М.: Мир, 1979.
Информация об авторах
Метрики
Просмотров web
За все время: 186
В прошлом месяце: 22
В текущем месяце: 7
Скачиваний PDF
За все время: 78
В прошлом месяце: 3
В текущем месяце: 1
Всего
За все время: 264
В прошлом месяце: 25
В текущем месяце: 8